小工具大才能,解决3D打印大问题
将人的能力和意识转移给机器是机器人工程中最困难的部分。比如轻柔而牢固地抓住物品只是人类下意识的动作,但让机器人来做的话确并不是很容易的事。
因此,很多科学家花费了大量的时间和精力开发各种技术致力于让机器人能够像人类那样抓握物品。但是如今有两位科学家却独辟蹊径,从另外一个角度考虑这个问题:当前世界的产品都是根据人类的需求制造的,那么为什么不在物品上稍加改造,使其更加适应机器人的行动方式,对机器人更加“友好”呢?

这两位科学家是来自华盛顿大学人本机器人实验室(Human Centered Robotics Lab)的Zhe Xu和Maya Cakmak。他们在近期举行的2014 IEEE智能机器人与系统(IROS)国际会议上发表了自己的研究结果。根据这一理论,他们还开发出一种简单的3D打印工具Griple,该工具能够装在普通的物品上使机器人抓握和使用更加方便。更重要的是,它还很便宜、耐用,制造和使用都很方便。

Griple可称为一种适配器,能够很容易地安装在各种像扫帚和刷子这样的日常用品上,以便机器人能够牢固地抓握和使用这些物品。
正如你们在本文底部的视频中看到的那样,清洁机器人突然成为一个可行的现实,而您所需要做的,只是以极低的成本3D打印出一个小小的工具,然后使用Sugru自固化硅胶将其固定在目标物品上。这样一来,就轻易化解了曾经让机器人工程师们抓狂的3大难题:抓握、使用和放置。

Griple研究小组为此做了一系列的测试,让一部PR2机器人用抓取和使用像海绵、抹布和刷子这类的物品,然后再把这些东西放回原处。
在使用Griple之前,这部机器人的成功率为86%(已经是相当不错的数据);但在目标物品上加上Grple之后,成功率则大幅提升至99%。
此外,据了解,两位科学家还提出,Griple还可以帮助机器人识别物品,只需在其上面加入电子标签,比如QR码,就能让机器人很容易地认识到,这是一个马桶刷,而不是牙刷。

尽管从技术上来说,Griple简直不值一提。但从更高层次上说,却意义重大,它让人们看到,只需换个思路,进行简单和巧妙的创新,就能让机器人更快地融入人类生活。3D打印技术则是实现这种创新的有力工具。
(责任编辑:admin)

 3D打印黄金吊坠让人们铭记
3D打印黄金吊坠让人们铭记 令人惊艳的3D打印喷气飞行
令人惊艳的3D打印喷气飞行 全球PK 3D打印PPSU,SOLVA
全球PK 3D打印PPSU,SOLVA 看3D打印自动化单元如何在
看3D打印自动化单元如何在 大型高精度电子结构件产品
大型高精度电子结构件产品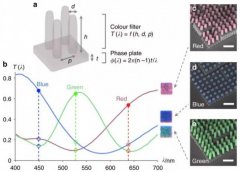 新型防伪技术:同一束光照
新型防伪技术:同一束光照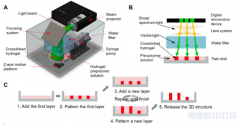 用于细胞3D打印的
用于细胞3D打印的

