教您用软胶棒和3D打印轻松制作软机器人
在这个世界上不断涌现的各种发明中,总是有一些看上去没什么实际用处,但却新奇有趣,很吸引眼球的项目。下面要介绍的使用3D打印、少量热胶棒、几根绳子和一对伺服电机制造出来的软机器人可能就属于这一类。

Pavel Mihaylov就是这个软机器人的开发者,他是爱丁堡大学电子和电气工程专业的学生,平时也非常喜欢做一些DIY项目。
“好吧,它并非全部都是软的,但它有一些软的部分,比如热胶棒。”Mihaylov表示。“这些热胶棒在整个设计中起到了核心的作用,它们构成了软机器人的主体,而且由于有一定的弹性,它还起到了弹簧的作用,以此驱动机器人向前移动。”

Mihaylov说这个设计巧妙的机器人之所以能够移动,因为其尾端在向一个方向上移动时与地面产生的摩擦力很小,而向另一个方向移动时,尾端与地面的摩擦力却变得很大。
“尾端是被两根绳子拉着向前走的”Mihaylov表示,“然后,它们放开,并借助胶棒的弹性向前移动,这个时候尾端是撑在地上的。”
他说,只是一个非常简单的机器人,只需几根尼龙绳和热胶棒、一个或两个伺服、一块 Arduino Uno或任何能够驱动伺服和电池的微控制器。

当把所有的零件都准备好之后,只需将伺服连到微控制器和电源上。为了提供更多的功率,Mihaylov用了两个伺服电机,您也可以根据自己的需要使用使用更多或更少的伺服。Mihaylov写了一个详细的制作教程放在了开源社区instructables上(点击浏览)。如果您不太懂Arduino或微控制器的编程也没关系,Mihaylov还编写了一段可用的代码放在了教程里。

剩下的就是3D打印一个合适的外壳将微控制器、电池和伺服连接起来,然后参考Mihaylov提供的图纸,将各个部件组装起来,这样一个不知疲倦的爬行机器人就完成了。
“它能够爬过草坪、光滑的塑料和崎岖的地形,”Mihaylov表示。“在经过草地的时候我不得不在其尾部加一些钉子,使其摩擦变大。这不是什么高精尖,但是它很酷。”
(责任编辑:admin)

 3D打印黄金吊坠让人们铭记
3D打印黄金吊坠让人们铭记 令人惊艳的3D打印喷气飞行
令人惊艳的3D打印喷气飞行 全球PK 3D打印PPSU,SOLVA
全球PK 3D打印PPSU,SOLVA 看3D打印自动化单元如何在
看3D打印自动化单元如何在 大型高精度电子结构件产品
大型高精度电子结构件产品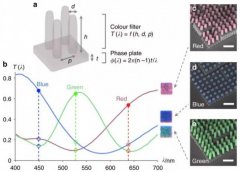 新型防伪技术:同一束光照
新型防伪技术:同一束光照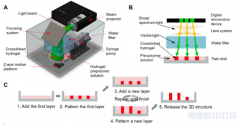 用于细胞3D打印的
用于细胞3D打印的

