美海军科研人员设计出可用的3D打印机械工具
John Steuben是位于华盛顿的美国海军研究实验室博士后研究员,而在业余时间时他又是一名创客。近日,在进行多场耦合计算系统实验室的一项实验时,他需要对增材制造(即3D打印)工艺和材料进行计算机模拟。在这次实验中,Steuben需要将一些非常精细的测试样本放进一个大的液压拉力试验机里,要求这些样本上面不能留下痕迹,而Steuben自己又不愿意冒险把手指伸进液压机。无奈之下,Steuben没有勉强使用实验室里现有的工具器材,而是自己设计并3D打印了一个可调槽钳。

这把钳子是基于一个旋转的榫槽机构设计的,它在打印过程中可放大或者缩小,而且能够夹取0―50毫米的对象。Steuben对于钳子的颚板和把手的设计主要是借鉴他手边的一对旧的Diamond Tool和马蹄牌的铸钢钳,因为他希望这两把工具的外形和人体工学设计。此外用于调节钳子尺寸的榫槽机构则是模仿Channellock公司的产品。“榫和凹槽的设计很适合增材制造。”Steuben说,“把持物体的机械应力是由一个轴销和一个榫槽同时产生的,这些组件共同形成纯剪力。其结果是这些钳子都很强。”

Steuben使用SolidWorks软件设计出了钳子的3D模型,然后用自己的Makergear M2 3D打印机将其打印出来,材料使用的是金黄色的PLA线材,为了确保机械强度,该打印填充率被设置为100%。这把工具全部都是3D打印的,但是打印时间总共花了仅35分钟。Steuben说,他对于最终打印出来的工具的性能和强度很满意,而且还可以根据个人使用者的具体需求很方便地调整工具的尺寸参数。“如果是100%的填充率打印的,使用者的手上使出全力也没关系。”他说。然而,需要提醒的是,尽管这把钳子能够以更小的尺寸打印出来,但是这会大大降低它们的强度。如果尺寸降低到50%,这把钳子将失效。



这些钳子并不是Steuben用3D打印机制造的唯一工具。如下图所示,他正在制作的还包括一把75%比例的可调槽钳、也正在对槽关节钳子的75%比例的模型;一把复合钳,这把钳子设计了四个柔性关节围成菱形以产生更好的机械性能;和一把精确的,1/3比例的Coe活动扳手(“真正”的猴子扳手)。

Steuben已经把这把可调槽钳子的3D设计文件放在网上免费共享(点击此处免费下载:http://www.3ddayin.net/soft/zuhejixie/12518.html),您如果有兴趣,不妨下载打印一个玩玩,反正也不需要很长的时间。Steuben希望不久的将来能够上传更多自己设计的可3D打印工具。
(责任编辑:admin)

 3D打印黄金吊坠让人们铭记
3D打印黄金吊坠让人们铭记 令人惊艳的3D打印喷气飞行
令人惊艳的3D打印喷气飞行 全球PK 3D打印PPSU,SOLVA
全球PK 3D打印PPSU,SOLVA 看3D打印自动化单元如何在
看3D打印自动化单元如何在 大型高精度电子结构件产品
大型高精度电子结构件产品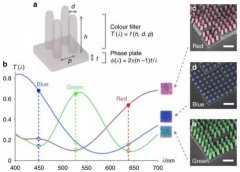 新型防伪技术:同一束光照
新型防伪技术:同一束光照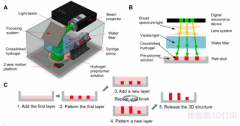 用于细胞3D打印的
用于细胞3D打印的

