以色列工程师3D打印的仿生六足机器人
在其他3D打印项目我们已经看到那些拥有互动能力的机器人都搭载着Arduino,树莓派或其他微控制器板。

Arduino,树莓派或其他微控制器板,这不仅经济实惠,而且也简单易学,提供了丰富的功能,那么能否则用静态3D打印方式打印自己需要东西呢?大多数用户认为这是可以实现的。以色列技术学院Technion工业一个博士乔纳森・施皮茨成功地把3D打印与微控制器结合起来制造了爬行机器人。

选择专注自己的发展仿生控制器双足行走后,斯皮茨购买了一台3D打印机,多次反复开发步行机器人。斯皮茨选择迭代掉他在伯克利,美国加利福尼亚州一位同事做了一个项目。 集中在一个自主的3D打印的机器人项目STAR上,以适应各种不同的表面,从崎岖坎坷的道路到平坦的马路。 它也能往一个目的爬行,如果它确定它无法攀越 ,它能自己再找出路。 因为它能够以5.2米/秒以上的速度在光滑的表面上爬行,它被称为最快不受限制的爬行机器人。
施皮茨的第一次迭代,被命名“比利”,是他自己多次反复设计的结果。 斯皮茨能够创建自己的3D打印机所需的机械零件,制造类似STAR作为一个工作原型的机器人。 不久之后,他就直接一头扎进他的Arduino编码。比利具有两个直流电动机即移动腿在主体的两侧。 使用蓝牙模块,斯皮茨是能够直接从他的智能手机应用程序操纵杆控制比利的动作。

与他的新朋友比利周游世界后,斯皮茨收集了有关如何改进比利的设计,他在创建比利的基础上打印了它的搭档查理。
“查理比比利更苗条,”施皮茨对中国3D打印机网说。“即使他有更多的组件, 我用了一个小的Arduino微处理器控制查理的四台电机:两个用于步行和两个用于攀延。

由于他的轻薄尺寸(比比利轻约40%),查理在倒挂的情况下,他曾经自己翻转过过走路。据施皮茨介绍,查理有攀爬的机制,也允许机器人在平坦的地形快速行走,更复杂的障碍智能减慢走过去。 他甚至可以爬上大于45度陡峭。


此外,所有的查理的零件的齿轮箱的内侧被密封,以防止杂物如灰尘,卵石和草卡住的齿轮。 斯皮茨说,铰链的设计保证了变速箱可以打开或关闭,方便接入交换齿轮和腿。


“现在,我的机器人建设技能都比较成熟,我正在寻找将这些可爱的机器人推向市场的最佳途径,”施皮茨补充道。

文章出处:中国3D打印机网 http://www.china3dprint.com/3dnews/8933.html
(责任编辑:admin)

 3D打印黄金吊坠让人们铭记
3D打印黄金吊坠让人们铭记 令人惊艳的3D打印喷气飞行
令人惊艳的3D打印喷气飞行 全球PK 3D打印PPSU,SOLVA
全球PK 3D打印PPSU,SOLVA 看3D打印自动化单元如何在
看3D打印自动化单元如何在 大型高精度电子结构件产品
大型高精度电子结构件产品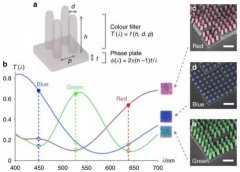 新型防伪技术:同一束光照
新型防伪技术:同一束光照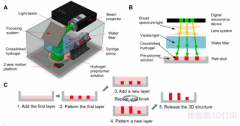 用于细胞3D打印的
用于细胞3D打印的

