视觉测量助力“机器人化智能制造”
▲李文龙(左)带领研发团队进行技术攻关
以机器人作为制造装备执行体,集成视力觉智能传感的机器人化智能制造正逐渐成为大型复杂构件制造的变革性新模式。华中科技大学二级教授李文龙认为,随着工业机器人与三维视觉测量、人工智能算法等新一代信息技术的深度融合,机器人化智能制造系统将突破柔顺性、自律性与人机共融能力,大大提升系统灵巧性和人机交互能力,具有广泛的应用前景,代表着智能制造的主攻方向。为此李文龙面向国家重大需求,瞄准视觉测量与机器人化智能制造学术前沿,围绕高精度三维视觉测量技术、机器人加工精度保障技术、机器人检测/加工智能装备研制,开展了深入研究。同时科研反哺教学,秉承“立德树人、科教融合”的教学理念,他矢志不渝地培养机器人化智能制造拔尖创新人才。
潜心科研十五载,突破复杂构件高精度视觉测量核心技术
“做科研既要仰望星空,也要脚踏实地,勇于选择最前沿的学术方向去攻克。”李文龙意味深长地说。15年前,李文龙刚刚博士毕业,正在参与国家自然科学基金重点项目“大型复杂曲面零件的数字化设计-加工-测量一体化理论与技术”。他敏锐地觉察到三维视觉测量具有非接触式、快速高效、在位在线的技术优势,在曲面变形测量与机器人加工精度控制方面具有广阔的应用前景,但景深变化、工件反光、海量数据等因素严重制约着三维视觉测量技术的应用。

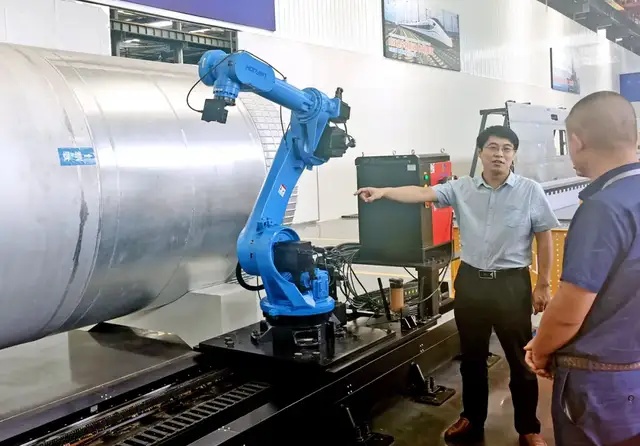
▲李文龙主持研制的机器人测量-加工一体化智能制造装备
为此李文龙带领团队研究了面向复杂构件的多视相移成像原理,提出了三维成像关键参数精确标定方法,解决了三维测点计算精度受限于测量景深与表面反光影响的技术难题。针对测点规模大(千万/亿级)、测点层叠、高斯/粗大噪音等现场固有测量缺陷,团队建立了海量测点精简、光顺与融合的数学模型和计算方法,提出了方差最小化原理的曲面匹配定位新技术,攻克了国际通用点-点(ICP)距离与点-切面(TDM)距离匹配受初始位姿任意/复杂薄壁特征影响引起的切向滑移难题,开发出iPoint3D测点处理与轮廓评价软件系统。
上述研究成果获高等教育科学研究优秀成果奖技术发明奖一等奖(李文龙排名第一),应用于某企业叶片零件测点数据处理与曲面轮廓检测,相比已有方式单件检测时间缩短85%以上,突破了国外同类检测技术的行业垄断与商业禁售风险;应用于4款汽车发动机缸体缸盖等大型复杂构件全轮廓扫描与关键特征参数提取,完成了多款新型汽车发动机的数字建模与新产品开发,作为关键技术之一支撑应用企业连续8年入选世界500强。
瞄准国家重大需求,研制机器人测量/加工智能制造装备
李文龙指出,“瞄准国家重大战略需求,解决重大工程中的关键卡脖子难题,才是一名科技工作者追梦的制高点”。他多次到中国航发、中航工业、中核武汉等企业调研学习,与一线工人深入交流,发现普遍存在制造模式转型升级需求:将肉眼检测提升为高精度视觉检测,将手工操作提升为稳定机器人操作。但航空蒙皮、垂尾、核电法兰面等尺寸大、易变形、难加工,如何实现机器人测量-加工一体化与精度控制已成为制约制造模式转型升级的瓶颈。
针对航空蒙皮、核电法兰面等大尺寸复杂构件多视角测量整体误差累积放大问题,李文龙研究了多视角测量数据无标记点全局精确拼接新方法,机器人测量系统精度达到±0.015(基础精度)+0.02mm(拼接精度)/m;提出了面向易变形复杂构件的刀具轨迹光顺与刀轴偏差控制方法,生成同时满足光顺性、刚度与灵巧度要求的机器人加工姿态,解决了由离散测点直接生成加工路径存在的刀具路径点与刀轴矢量抖动问题;针对机器人测量-加工一体化系统多单元多源误差耦合降低轨迹精度难题,建立了SE(3)群空间双机器人同步标定凸优化目标函数,实现了加工机器人末端实时闭环反馈与轨迹精度控制。
上述研究出版著作2部,3篇代表作以系列论文形式发表在《IEEE机器人汇刊》(IEEE T. Robotics),4篇中文论文被《机械工程学报》《航空学报》等作为封面专题报道,被同行权威学者彼得罗·瓦尔达斯特里(Pietro Valdastri)教授评价为“相比传统方法具有卓越的精度和效率”。李文龙带领团队取得了多项创新成果:研制了大型蒙皮、垂尾和核电法兰面的机器人测量系统,为航空复杂构件现场检测、核电机组现场运维提供了重要技术平台;研制了机器人测量-加工一体化智能装备,应用于近千件蒙皮机器人铣削加工,实现了机器人磨抛在核电大叶片批量生产中的应用。
秉承科教融合育人,培养机器人智能制造拔尖创新人才
作为一名人民教师,李文龙始终坚持立德树人这一根本任务。他结合学术发展前沿,历时3年编写了《机器人学》教材,获全国优秀教材奖一等奖(李文龙排名第二),将机器人学内涵从工业机器人扩展到海陆空和共融机器人,增加了线矢量与运动旋量、指数积运动学建模、机器人视觉定位等新理论新知识,反映了当前机器人学术发展和技术应用前沿,为培养学生技术创新能力提供了源头活水。

▲李文龙为机器人工程方向本科生现场上课
李文龙主持承担了省、校、院教改项目4项,全面探索以学生优质培养为核心的机器人课程体系改革与教学模式改革,参与发起了全国性“机器人学教学研讨会”、参与承担了教育部“机器人学课程虚拟实验室”工作,提出以学生为中心、“教师授课+学生课堂讨论+自主网课学习+现场动手实践”相结合的教学新模式,支撑了华中科技大学2021年起“机器人”方向本科教学工作。作为导师,他培养王刚获德国洪堡学者、谢核获上银优秀机械博士论文佳作奖、蒋诚获航发集团科学技术奖、程育奇获十三届挑战杯大学生创业计划竞赛金奖、6名本科生获省/校优秀本科毕业设计奖。他带领团队参与申报的“面向新工科的智能制造创新人才培养体系构建”获国家级教学成果奖一等奖。
作为一名科技工作者,李文龙始终以国家重大需求为学术研究的制高点,在高精度视觉测量方面的突破性成果对我国航空、核电、汽车等行业技术攻关和产业应用作出了突出贡献,在机器人化智能制造方面的突破性成果支撑了我国新一代战机、ARJ21支线客机、华龙一号等国防重大工程建设。作为一名人民教师,李文龙秉承“科教融合、立德树人”的教学理念,不忘初心、矢志不渝地培养机器人化智能制造拔尖创新人才。相信在未来的教学科研生涯中,李文龙将继续“仰望星空、脚踏实地、教书育人”,在他热爱的工作岗位上为国家重大工程建设和拔尖创新人才培养贡献自己的力量。
(责任编辑:admin)

 中国智驾大洗牌 关海涛发
中国智驾大洗牌 关海涛发 威海南海新区:发力智能制
威海南海新区:发力智能制 探访副中心智能工厂!智能
探访副中心智能工厂!智能 视觉测量助力“机器人化
视觉测量助力“机器人化 有机遇也有对应的挑战,洞
有机遇也有对应的挑战,洞 论坛热议:企业智能制造浪
论坛热议:企业智能制造浪

