Intuitive Machines Nova-C即将使用3D打印引擎软着陆月球
时间:2024-02-16 10:22 来源:南极熊 作者:admin 阅读:次
2024年2月15日,领先的太空探索、基础设施和服务公司IntuitiveMachines(纳斯达克股票代码:LUNR、LUNRW)和
SpaceX 分析了 IM-1
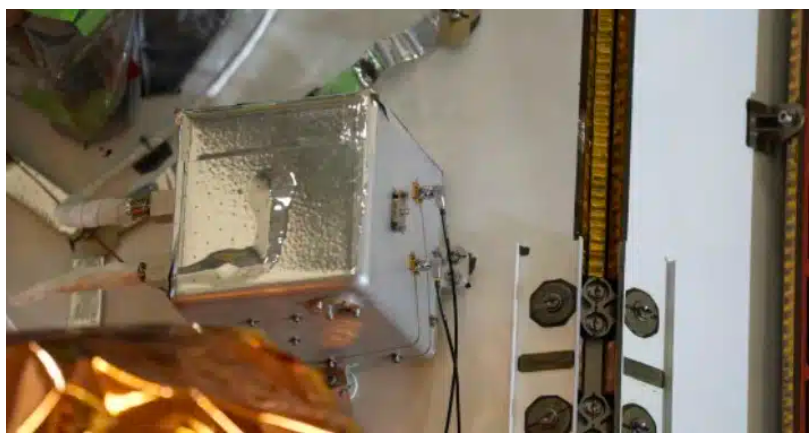
任务的月球着陆器加油测试的数据,并确定测试活动已完成。IM-1任务于2月15日从佛罗里达州NASA肯尼迪航天中心的39A发射场升空。它的最终目的地是月球,“Tardis大小”的Nova-C飞行器将利用其
3D 打印引擎尝试软着陆。
IM-1任务是
IntuitiveMachines首次尝试登月,作为NASA商业月球有效载荷服务(“CLPS”)计划的一部分,该计划是NASA阿尔忒弥斯月球探索工作的关键部分。作为CLPS的一部分,发送到月球表面的科学和技术有效载荷旨在为人类任务和人类在月球表面的可持续存在奠定基础。去年9月,当Intuitive
Machines在休斯敦开设其具有增材制造能力的月球生产和运营设施时,就确定了这一任务。
Intuitive Machines 的 IM-1 任务在 SpaceX 的猎鹰9 号火箭上从佛罗里达州
39A 发射中心发射,由于在进入甲烷负载之前甲烷温度低于标称温度,发射被推迟。SpaceX 和 Intuitive Machines
现在的目标是美国东部时间 2 月 15 日星期四凌晨1:05。更多更新可以在 Intuitive Machines 和 SpaceX
平台上找到。NASA 的直播将于美国东部时间 2 月15 日中午 12:20 开始。请在 NASA+、NASA TV 和该机构的网站观看。
10年酝酿
Intuitive Machines 是一家领先的太空探索和基础设施公司,成立于 2013 年,恰逢 3D 打印开始变得更容易被世界各地的工程师所接受。
联合创始人 Steve Altemus、Kam Ghaffarian 博士和 Tim Crain 博士走出
NASA 约翰逊航天中心的大门,尝试改变世界。2018 年,美国宣布月球具有战略利益,并重新将 NASA
的重点放在根据该机构的阿尔忒弥斯计划可持续地重返月球上。第二年,美国宇航局授予直觉机器公司第一个任务订单,将一套有效载荷降落在月球表面。
在接下来的四年里,Intuitive Machines 建立了整个太空计划,包括 Nova-C
月球着陆器、任务控制以及能够在月球距离传输航天器数据的全球月球遥测和跟踪网络 (LTN)。这些资产完成后,Intuitive Machines
已准备好执行其首次月球任务 IM-1。Intuitive Machines
从默默无闻的起步,现已发展成为一家多元化的太空探索和基础设施公司,准备开拓太空商业版图,并以登陆月球为北极星。
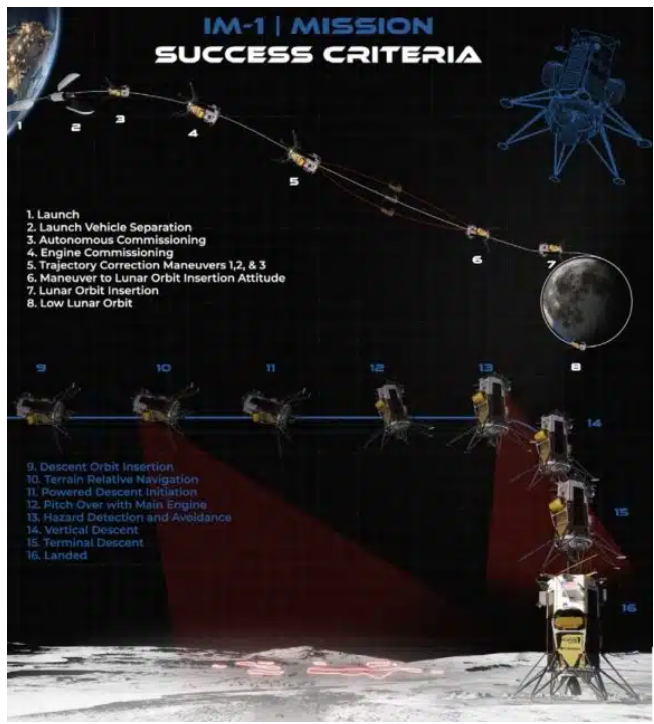
IM-1 任务准备就绪
IM-1 任务旨在成为自 1972 年阿波罗 17
号以来美国首个在月球表面软着陆的飞行器。Intuitive Machines 选择 SpaceX 使用 SpaceX Falcon 9
火箭发射该公司的 Nova-C 级月球着陆器,名为奥德修斯 (Odysseus)。 NASA 肯尼迪航天中心的 39A
台。发射后,奥德修斯计划与猎鹰 9 号火箭分离,沿着直接飞往月球的轨道。
德克萨斯州休斯敦 Nova Control 的 Intuitive Machines
飞行控制人员预计奥德修斯将在升空后大约九天登陆月球。着陆后,Intuitive Machines
及其客户预计在月夜落在月球南极之前在月球表面运行有效载荷大约 7 天,导致奥德修斯号无法运行。
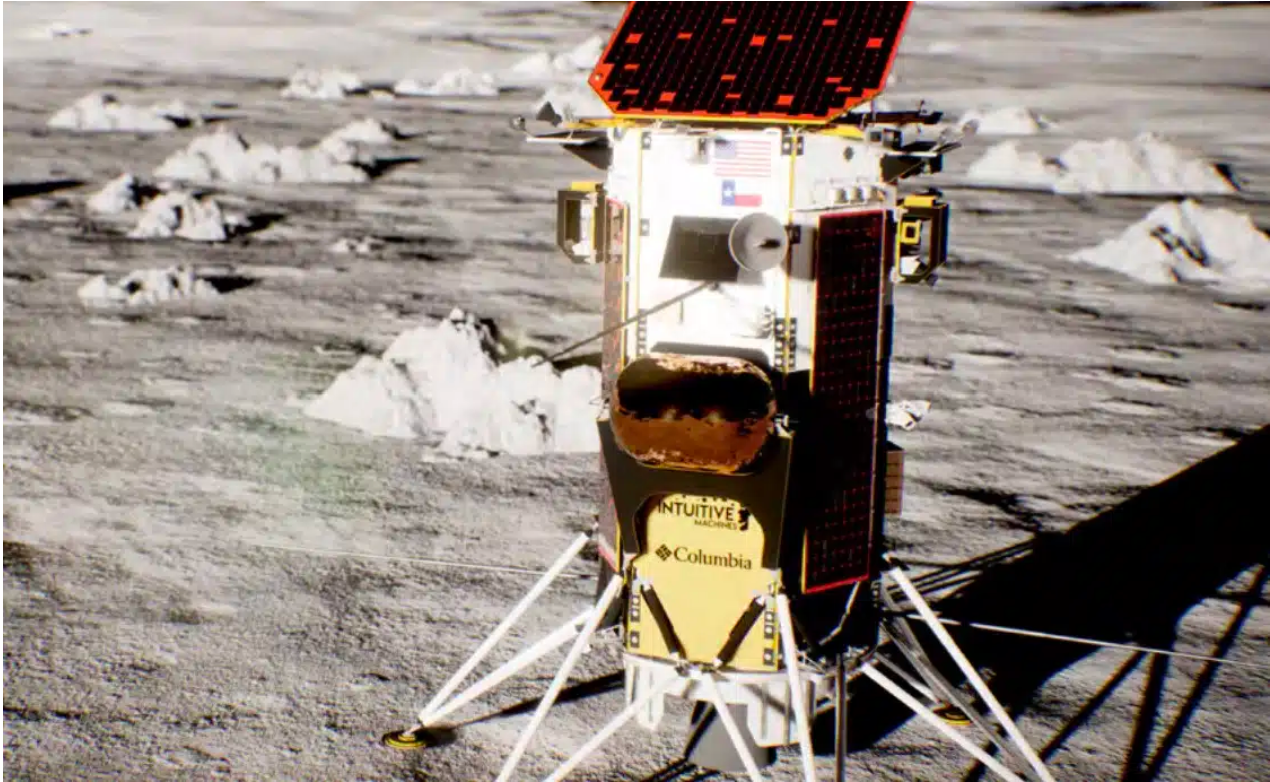
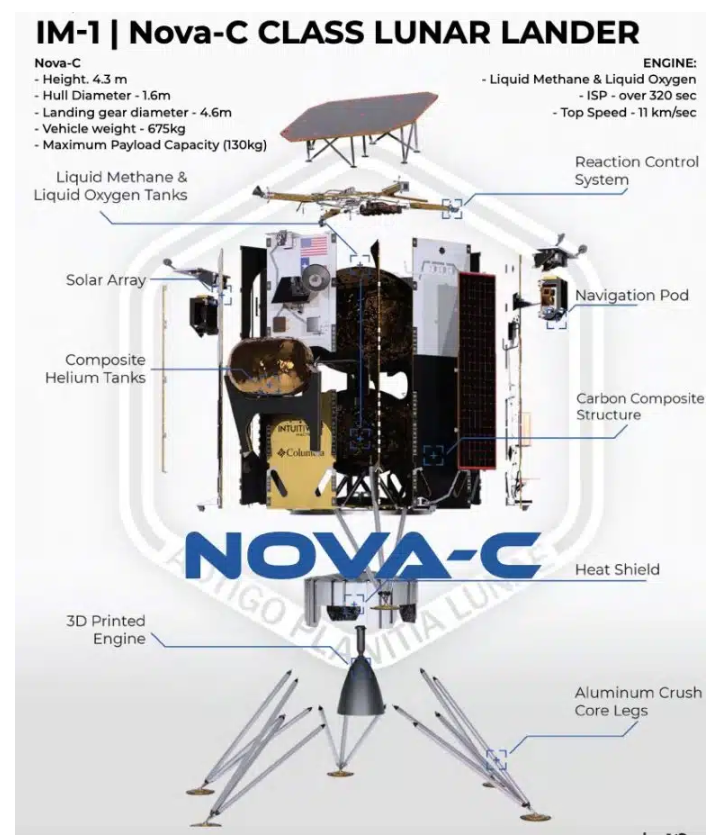
此次任务不仅标志着时隔数十年重返月球表面,而且标志着商业月球科学和探索新时代的大胆跨越。IM-1
任务的核心是 Nova-C 月球着陆器,由 Intuitive Machines
设计和建造。该着陆器配备了最先进的技术,包括由液氧和液甲烷的环保混合物提供动力的推进系统。

Nova Control 的设计类似于《星际迷航》中的企业号航空母舰舰桥。Nova-C
使用两种类型的无线电。飞行器健康状况和航天器状态的运行速度与 1976
年调制解调器相当。与此同时,科学数据无线电的速度提高了16,000倍。Nova-C
最初设计为圆柱形外壳。该公司转向六角形结构,以适应质量和有效载荷集成限制。Intuitive Machines 员工的名字被刻在 Nova-C
的页脚上,永久地印在月球上。
月球运输
IM-1任务的主要目标是将各种有效载荷运送到月球南极地区,这是月球尚未探索的一部分。这些有效载荷包括科学仪器和技术演示,旨在为未来人类和机器人探索月球铺平道路。IM-1
任务的意义不仅仅是登陆月球表面。它代表了正在进行的太空探索的关键时刻,私营企业在其中发挥着越来越重要的作用。
通过 NASA 的商业月球有效载荷服务(CLPS) 计划,IM-1
任务是促进月球可持续存在、促进科学发现、资源利用和月球基础设施发展的更广泛战略的一部分。从这次任务中获得的知识和经验对于塑造未来的月球及更远地区的任务将是非常宝贵的。此外,IM-1任务的成功将为月球经济的蓬勃发展奠定基础,为研究、商业和探索开辟新的可能性。
通过提高我们在月球表面运作的能力,该任务为更雄心勃勃的努力奠定了基础,包括建立月球基地和探索潜在资源。IM-1 任务收集的数据和见解将有可能解决在月球上生活和工作的挑战,从而进一步推进人类成为多行星物种的梦想。

Nova Control 是Intuitive Machines
位于德克萨斯州休斯顿的月球任务运营的神经中枢。运营中心在协作循环环境中托管任务控制器,可以访问关键任务和支持软件,包括 VoIP
语音系统。Nova Control 已投入商业使用,关键任务指挥和控制软件 Nova Core 是在内部开发和维护的,并与西澳大利亚的
Fugro SpAARC 合作实现了应急操作。
Intuitive Machines 与全球地面站签订了长期协议,其中包括月球跟踪、遥测和指挥网络
(LTN),支持 S 频段、X 频段和 Ka 频段上行链路和下行链路。2022 年 12 月,当 NASA 的阿耳忒弥斯I
号航天器到达距地球最远距离时,Intuitive Machines 成功跟踪该任务,从而验证了其 LDN。
阿尔忒弥斯之前
马拉珀特 A 是马拉珀特陨石坑的一个卫星陨石坑,马拉珀特陨石坑是月球南极地区长 69 公里的陨石坑。以 17
世纪比利时天文学家查尔斯・马拉佩特 (Charles Malapert) 的名字命名,着陆点周围的区域被认为是由月球高地物质构成,类似于阿波罗
16 号的着陆点。IM-1着陆点距月球南极约300公里。附近的 Malapert Massif 是 NASA 考虑执行阿耳忒弥斯 III
任务的 13 个候选地区之一。
发射后不久,弹力将轻轻地将奥德修斯推离运载火箭的第二级,使月球着陆器能够部署并飘向月球。奥德修斯在分离前处于待命状态。断开与运载火箭连接的电线让
Nova-C
航天器知道它已经部署,着陆器上的计时器启动以激活其主要系统。完成分离计时间隔后,奥德修斯启动,包括制导导航和控制(GNC)、自动飞行管理(AFM)软件、无线电和热控制。
当奥德修斯的顶层甲板指向太阳时,这被称为最大功率姿态,这也有助于德克萨斯州休斯顿的飞行控制器通过将其他系统保持在顶层甲板和侧面的阴影中来管理着陆器在飞行器上的热状态甲板太阳能电池阵列。调试过程中的每一步都预计会自动进行,因为休斯顿的飞行控制人员尚未与奥德修斯进行通信。当自主调试完成并建立最大功率姿态时,Odysseus
打开其通信无线电并与 Nova Control 中的飞行控制器进行首次联系。
Intuitive Machines 预计在 LVSEP 几分钟后自动委托
Odysseus。在自主调试期间,着陆器的 GNC
激活冷气氦反应控制系统(RCS)来控制飞行器姿态。此时,奥德修斯不知道它指向哪里,但它可以停止其旋转运动,就像一个闭着眼睛坐在椅子上旋转的人可以控制旋转而不知道它停止在哪里。在控制旋转速度后,称为星跟踪器的特殊相机会自动匹配遥远星场的图像,并为奥德修斯提供其方向。
机载软件获取星跟踪器测量结果,并通过称为卡尔曼滤波器的算法对其进行处理,以纠正机载方向(称为姿态),然后估计并消除不良测量结果。一旦
GNC 系统自主确定其相对于星场的姿态,它就会使用标称发射矢量的参考位置来确定太阳的大致位置。然后,GNC 命令 RCS
喷气机以微小角度操纵着陆器的顶板朝向太阳,以照亮顶板和侧面太阳能电池阵列,以产生最大功率。
执行主机燃烧有多个步骤。第一个是将低温甲烷和氧气沿着着陆器的供给管线输送到发动机,以调节推进系统的温度;我们称之为“冷却引擎”。PROP
在此过程中监控多个自动阀门和温度读数,以确保一切都在预期参数范围内进行。机载AFM 正在监测 CM 开始的点火时间 (TIG)。在 TIG
之前几秒钟,RCS
系统会喷射喷射器来沉淀储罐中的液态甲烷和氧气。然后,主发动机点火器打开,就像燃气烤箱中的指示灯一样,点燃甲烷和氧气,这些甲烷和氧气通过主节气门的精心打开而在燃烧室中混合。
Intuitive Machines 已对 3D
打印发动机启动序列进行了数千次测试,以验证安全性和可靠性。在CM过程中,车辆通过调整Intuitive
Machines团队设计的两轴万向环内主机的角度来保持恒定的姿态。自动 CM 序列还会对主发动机进行节流,为 PROP
团队提供数据,以便在发动机的功率范围内进行必要的调整。与此同时,奥德修斯继续向月球航行。自主调试后,Nova Control
的飞行控制器准备使用奥德修斯最先进的低温推进系统进行发动机调试操作。
发动机调试操作允许飞行控制器验证发动机性能并调整着陆器的第一轨迹。在 LVSEP 之后,奥德修斯将在跨月轨道
(TLO) 上运行,在发动机调试之前前往月球。轨迹小组 (TRAJ) 上的飞行控制器使用着陆器通信系统发出的信号来执行轨道确定
(OD),并根据该信号数据发射弧线来更新其移动速度。预计细微的修正将保持在正确的轨道上,就像汽车司机沿着笔直的道路对方向盘进行细微的调整一样。
Intuitive Machines 的飞行动力学官 (FDO) 使用此更新来计算执行发动机调试机动
(CM) 的方向,以最佳改进奥德修斯拦截月球的轨迹。根据 FDO 设定的 CM 方向,IntuitiveMachines 的飞行管理员 (FM)
和通信官(COMM) 命令飞行器从最大功率姿态旋转到燃烧姿态。现在,CM 将控制权移交给 Intuitive Machines 的推进操作
(PROP) 领导,开始主发动机燃烧。
Nova-C 级月球着陆器的三次TCM 燃烧是在最大油门下执行的,此时发动机的效率最高。每次 TCM
后,Intuitive Machines 飞行控制器将着陆器的 HGA 指向地球,以便与 Nova Control 进行通信。TCM 3
之后,TRAJ 团队与 FDO 合作,最终确定了对于更新月球轨道插入 (LOI) 机动至关重要的 OD
解决方案。同时,奥德修斯的顶层甲板在TCM 3后最大限度地捕获太阳能,采取最大功率的态度。当 LOI 接近时,奥德修斯利用其 RCS
进行逆行定向,将发动机引向月球,以便在机动之前实现最佳定位。
CM 之后,TRAJ 从另一个 OD 更新中收集数据。FDO
评估此更新并计算奥德修斯距离其绕月轨道目标还有多远。FDO 使用称为 B
平面的特殊坐标系,该坐标系的任务设计相当于篮球篮板上的正方形。如果篮球运动员投篮击中篮板方格,球就更有可能进入篮筐。同样,如果奥德修斯在 B
平面上击中目标,它就处于被捕获进入月球轨道的正确位置。
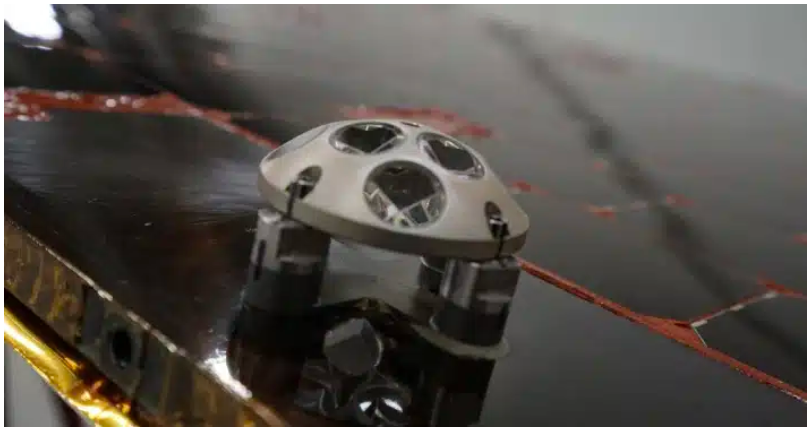
△LRA
是安装在着陆器上的八个大约半英寸后向反射器的集合,这是用于测量距离的独特镜子集合。镜子系统将激光直接反射回轨道航天器,航天器发射激光以精确确定着陆器在月球表面的位置。LRA
很有价值,因为它们可以继续用作月球白天或夜晚的指导和导航的精确地标。阿尔忒弥斯着陆点或大本营周围的一些上帝抵抗军可以作为精确地标,通过帮助自主和安全着陆来引导到达的着陆器。
预期的任务场景是,当飞行控制器拨入着陆器的 B 平面目标时,每次轨迹修正机动 (TCM)
将小于前一次。TCM 3 是最关键的机动,因为这是休斯顿飞行控制人员在奥德修斯进入月球轨道之前纠正其轨迹的最后机会。对于每个 TCM,FDO
都会评估将 B
平面目标保持在着陆器路径中所需的机动大小。如果TCM小于奥德修斯主机的执行能力,飞控可以选择不执行该TCM并在下一次机会时进行任何修正。
飞行控制员在 Odysseus 上加载最终的 LOI 机动解决方案后,Intuitive Machines
预计观察系统将花费大约四个小时为这次机动做准备。对于 IM-1,LOI
是在月球背面盲区进行的。飞行控制器无法接收实时更新,因为没有返回地球的视距通信。Nova Control 团队对 LOI TIG
进行倒计时,并等待着陆器执行每秒 800 至 900 米的最大机动,以进入 100 公里的圆形低月球轨道 (LLO)。
这种机动大约是奥德修斯推进系统总能力的三分之一。成功完成 LOI 后,Nova Control
团队开始一系列活动,检查着陆器的状态及其在 LLO
中的系统,为着陆做好准备。这包括针对月球照明条件校准奥德修斯的导航光学相机。对于每个月球轨道,Intuitive Machines 预计将有大约
75 分钟的通信时间,随后月球会阻挡奥德修斯着陆器和 Intuitive Machines 地面站之间的直接视距无线电链路,通信时间为
45分钟。
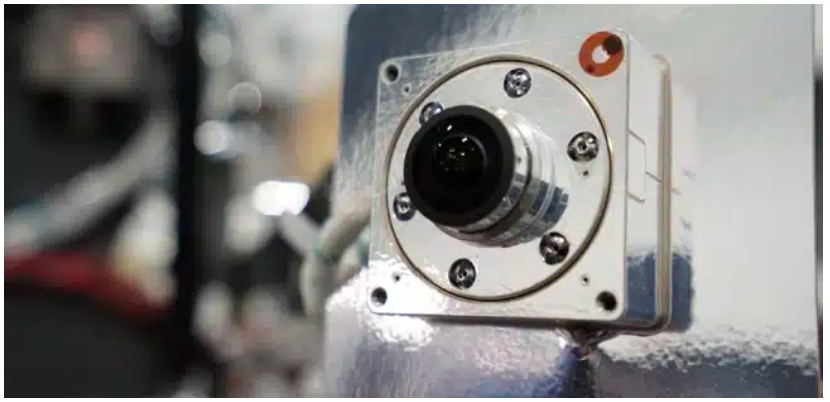
△Eaglecam 的设计目的是在 Nova-C 上部署在月球表面上方约 100 英尺(30 m)处,并在航天器着陆月球时捕获图像。
当飞行控制器失去通信并处于通信中断状态时,我们称之为信号丢失(LOS)。当飞行控制器重新获得通信并位于视线范围内时,我们称之为信号采集(AOS)。奥德修斯在降落到月球表面之前将绕月球大约
12 圈。对于 Intuitive Machines 来说,LLO 环境比奥德修斯在运输过程中经历的深空环境更加复杂。
月球的恶劣环境正在积极发挥作用。当着陆器位于轨道向阳的一侧时,太阳会加热着陆器的一侧,但月球也会用反射的红外辐射烘烤航天器的另一侧,因此奥德修斯非常温暖。然后,着陆器进入月球阴影,飞行器陷入极冷状态,需要从电池中获取加热器电力来保持系统温暖。
下降轨道插入(DOI)是一种小型机动,通常发生在月球背面。主发动机点火使着陆器减速,使其最低高度从 100
公里下降到着陆点附近约 10 公里。绕月轨道的低点称为近月点,高点称为近月点。在轨道上,奥德修斯在近周状态下运行得更快,在 apo
状态下运行得更慢。这种效应是势能的交换,就像人们骑自行车穿越山丘时所经历的那样,在低点滑行得快,在高峰滑行得慢。一旦 DOI
发生,Odysseus 就完全自主了。

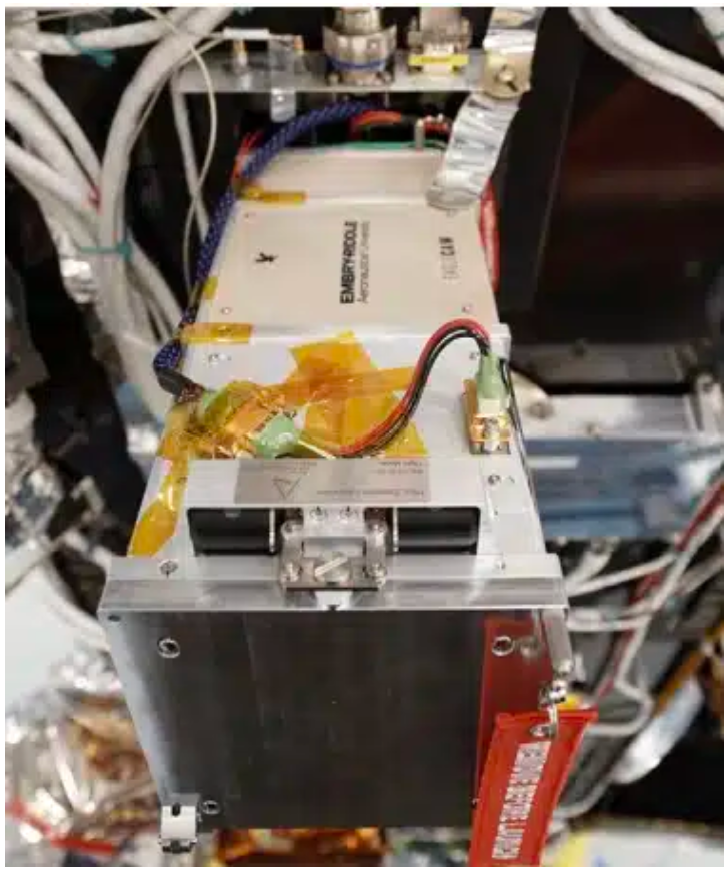
△SCALPSS
将捕捉着陆器发动机羽流在奥德修斯下降时与月球表面相互作用时以及航天器着陆后尘埃羽流沉降时的影响图像。这些信息对于验证火箭发动机废气如何移动月球表面粒子的预测模型至关重要,并使科学家能够分析月球表面的特写图像。SCALPSS
的数据可用于未来的 Artemis 飞行器设计,以确保着陆器和附近任何其他地面资产在着陆期间的安全
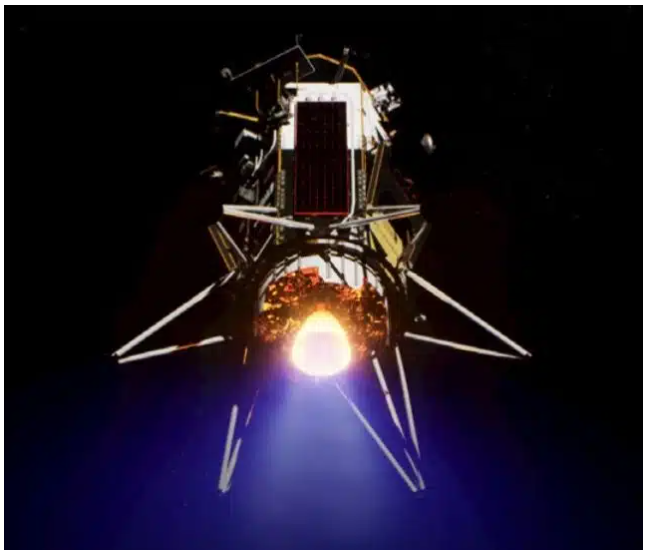
DOI 后,着陆器预计会滑行约一小时;然后,GNC
系统将启动主发动机进行动力下降启动(PDI)。下降轨道插入 奥德修斯必须将其速度降低约每秒 1,800
米,才能在月球表面软着陆。一些着陆器设计具有带有多个喷射器的推进系统,这些喷射器在下降过程中打开和关闭以实现这一目的;然而,Nova-C
的发动机设计为从 PDI 开始持续燃烧和节流直至着陆。
这种方法与阿波罗下降舱的做法类似。当着陆器发动机在 PDI
启动时,它最初处于硬制动阶段。着陆器一直处于制动阶段,直到距离着陆点约 2 公里。着陆器下侧的动力下降启动地形相对导航 (TRN)
摄像头和激光器向导航算法提供信息,从而提供引导和控制。这部分听起来可能很复杂,但这是人类每次走路、骑自行车或开车时都会做的事情。传感器就像人眼收集位置、速度和方向数据。
△ILO-X
是 ILOA 夏威夷旗舰月球南极天文台 ILO-1 的前身。约 0.6 公斤的ILO-X 仪器由多伦多 Canadensys
Aerospace 为 ILOA
制造,包括一个小型双摄像头月球成像套件(一个宽视野和一个窄视野)。它将旨在从月球表面捕获银河系中心的一些第一批图像,并进行其他天文学/地球/当地月球环境观测和探索技术验证――包括月球环境中的功能和生存能力。此次任务将是总部位于夏威夷的组织首次在月球上安装相机。夏威夷是一个崇尚科学、发现和用心探索的地方。在夏威夷学生命名比赛后,ILO-X
窄视场相机被命名为 Ka 'Imi(搜索)。从夏威夷下一代科学家那里获得这个名字是一种巨大的荣誉,也是对 ILOA
称之为家乡的夏威夷群岛上存在的独特文化的庆祝。
导航是大脑处理这些信息以确定您移动的位置和方式。指导类似于人脑决定,如果我在这里,朝这个方向前进,我需要做什么才能到达我想去的地方?答案可能是左转或加速。控制相当于转动方向盘或踩油门来提高引导指令。人眼充当传感器,观察事物如何变化,并重复整个循环。
现在,奥德修斯基本上是直立的,危险相对导航(HRN)传感器在着陆器打算着陆的区域面向前方。Intuitive
Machines 设计了奥德修斯飞往月球预定着陆点 (ILS)
的轨迹。一旦Nova-C级月球着陆器接近其ILS,机载软件就会根据着陆器的射程选择一个坡度最小、没有危险的安全指定着陆点(DLS)。
奥德修斯的系统旨在匹配月球重力以飞向
DLS。在此期间,主发动机不断节流,降低发动机功率,以补偿着陆器越来越轻,推进剂耗尽而离开航天器的质量。Odysseus 的 GNC
系统将着陆器飞行到 DLS 上方约 30 m 的位置,着陆器以每秒 3 米的速度垂直下降。然后,着陆器在距地面 10 米处以每秒 1
米的下降速度制动,为终端下降和着陆做好准备。
△RFMG
技术使用 Nova-C 储罐中的无线电波和天线来准确测量可用推进剂的数量。RFMG
在未来的长期任务中可能至关重要,这些任务将依赖于由液氢、液氧或液甲烷等低温推进剂作为燃料的航天器。这些推进剂效率很高,但储存起来很困难,因为即使在低温下它们也会很快蒸发。随着美国宇航局朝着通过阿耳忒弥斯将人类送回月球的目标迈进,能够准确测量航天器燃料水平将有助于科学家最大限度地利用资源。
此时,奥德修斯仅使用惯性测量。没有摄像机或激光器引导航天器到达月球表面,因为它们会读取着陆器发动机中扬起的月球尘埃。Odysseus
的惯性测量单元 (IMU)
可以像人的内耳一样感知加速度,感受旋转和加速度。终点下降就像走向一扇门并在最后三英尺闭上眼睛。你知道你已经足够近了,但你的内耳必须引导你穿过门。通过主发动机危险检测和规避进行俯仰垂直下降
终端下降
奥德修斯被设计成以每秒一米的速度着陆。飞行控制人员预计在确认最终里程碑(软着陆在月球表面)之前大约会延迟 15 秒。Intuitive Machines 及其客户预计将在月球南极落下、奥德修斯号无法运行之前进行大约 7 天的科学研究和技术演示。
(责任编辑:admin)

 微电热成型 (μETF)技术制
微电热成型 (μETF)技术制 Backflip推出用于3D扫描至
Backflip推出用于3D扫描至 潜力巨大,本田汽车正将3D
潜力巨大,本田汽车正将3D 最新Science子刊:生物3D
最新Science子刊:生物3D VERIGRAFT获得120万欧元Eu
VERIGRAFT获得120万欧元Eu 美国纽约大学《Biofabrica
美国纽约大学《Biofabrica最新内容
 《Small Science
《Small Science 南洋理工-剑桥大
南洋理工-剑桥大 清华大学:抗拉强
清华大学:抗拉强 《Science》:一
《Science》:一 国产大尺寸陶瓷3D
国产大尺寸陶瓷3D 南京工业大学:基
南京工业大学:基热点内容


