《Chem. Eng. J.》:4D打印仿生自传感水凝胶驱动器
时间:2023-08-29 11:36 来源:高分子科技 作者:admin 阅读:次
在自然界中,许多生物组织,如肌肉、皮肤、神经、木材、叶子和花朵由高度定向排列的微结构组成,呈各向异性,是实现定向力传导、信号传递和驱动的关键机制。例如,松果定向原纤维失水和吸水驱动其开、关。在温度、湿度、光、力的刺激下,植物的各向异性结构发生动态构象变化,产生运动。近年来,国内外学者开发了大量各向异性的仿生驱动器和仿生传感器,但如何模仿生命体,研制驱动-传感一体化的智能新材料,构建具有自我感知功能的软驱动器,仍是有待研究的前沿课题,对智能软机器人的发展具有重要意义。
中山大学材料科学与工程学院付俊教授团队致力于研究高性能仿生柔性驱动器(Mater Horiz 2023, 10.1039/D3MH00718A; Chem Eng J 2022, 450 138346; ACS Appl Mater Interfaces 2020, 12, 26476)和传感器(Mater Horiz 2020, 7, 1872-1882; J Mater Chem B 2021, 9, 4423-4443; Langmuir 2022, 38, 11503-11513; J Polym Sci 2022, 60, 2605-2606),报道了感知-驱动一体化的碳纤维复合水凝胶器件(Adv Funct Mater 2023, 33, 2211189)。
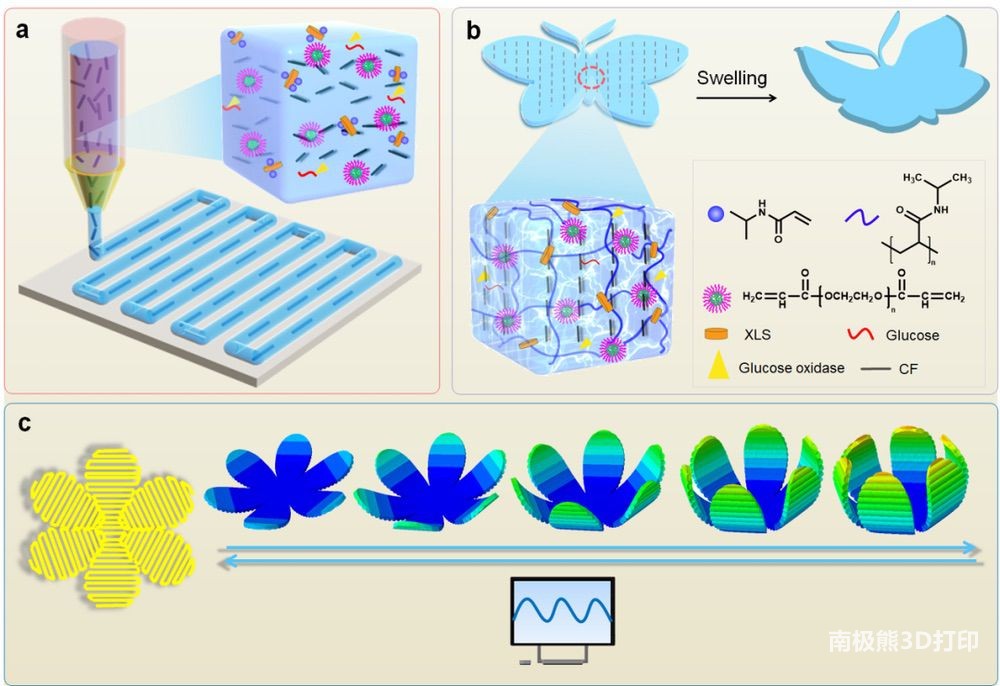
该团队的最新进展报道了4D打印仿生各向异性的自感知水凝胶驱动器(图1)。以短碳纤维/温敏水凝胶前驱液为墨水,利用挤出式3D打印的剪切力使短碳纤维(长约1 mm)在聚异丙基丙烯酰胺(PNIPAM)水凝胶内部定向排列,形成各向异性结构。碳纤维的取向排列使温敏水凝胶呈温度响应各向异性:当温度改变时,水凝胶在平行于碳纤维方向和垂直于碳纤维方向的溶胀或收缩率不同,不均匀的溶胀和收缩产生内应力,驱动变形。精确调控打印路径、定义碳纤维的取向方向,可灵活地调节水凝胶的形变路径。利用有限元分析(FEA)可以对变形进行模拟和设计(图2),构筑了多种仿生软驱动器(如捕蝇草和蝴蝶),实现了可控的温敏变形驱动(图2)。
碳纤维的高电导率和取向结构赋予复合水凝胶较好的传感性能。作者系统地研究了打印路径、水凝胶图案、网格结构等不同几何特征对传感性能的影响,研究发现,当碳纤维排列方向与拉伸方向相同时,此时的灵敏度最高且检测范围最大(图3)。将这种传感器贴附在手腕,手肘等关节处,能够实时监测关节的运动(图4a, b);将其贴附于声带,能够检测喝水和说话导致的微弱的振动(图4c, d)。
短碳纤维复合水凝胶的传感性能主要源于碳纤维在凝胶变形过程中的相对滑移。当温度改变时,水凝胶发生变形,其内部的碳纤维会随之发生相对移动,导致水凝胶电阻的变化。这就为驱动-传感一体化提供了可能。该团队打印了花瓣形和蝴蝶形的温敏复合水凝胶驱动器,调节温度,在水凝胶驱动过程中实时监测材料电阻率变化,当水凝胶驱动器在25℃和50℃之间反复驱动过程中,检测到稳定、可重复的电阻变化,二者呈现很强的相关性(图4f, h)。因此,该研究实现了对水凝胶驱动的自我监测。该方法可为智能软机器人的自我感知和反馈系统提供一定的启发。
该研究开发了一种方便、可编程的仿生各向异性水凝胶驱动器的制备方法,为软驱动器与传感器的集成开辟了一条道路,对于智能软机器人的开发和应用具有重要的意义。
该工作以“4D Printing of Biomimetic Anisotropic Self-sensing Hydrogel Actuators”为题发表在Chemical Engineering Journal。
论文链接:https://authors.elsevier.com/a/1hbs8_VWlWH2ml
图1 仿生4D打印各向异性自传感驱动器
中山大学材料科学与工程学院付俊教授团队致力于研究高性能仿生柔性驱动器(Mater Horiz 2023, 10.1039/D3MH00718A; Chem Eng J 2022, 450 138346; ACS Appl Mater Interfaces 2020, 12, 26476)和传感器(Mater Horiz 2020, 7, 1872-1882; J Mater Chem B 2021, 9, 4423-4443; Langmuir 2022, 38, 11503-11513; J Polym Sci 2022, 60, 2605-2606),报道了感知-驱动一体化的碳纤维复合水凝胶器件(Adv Funct Mater 2023, 33, 2211189)。
该团队的最新进展报道了4D打印仿生各向异性的自感知水凝胶驱动器(图1)。以短碳纤维/温敏水凝胶前驱液为墨水,利用挤出式3D打印的剪切力使短碳纤维(长约1 mm)在聚异丙基丙烯酰胺(PNIPAM)水凝胶内部定向排列,形成各向异性结构。碳纤维的取向排列使温敏水凝胶呈温度响应各向异性:当温度改变时,水凝胶在平行于碳纤维方向和垂直于碳纤维方向的溶胀或收缩率不同,不均匀的溶胀和收缩产生内应力,驱动变形。精确调控打印路径、定义碳纤维的取向方向,可灵活地调节水凝胶的形变路径。利用有限元分析(FEA)可以对变形进行模拟和设计(图2),构筑了多种仿生软驱动器(如捕蝇草和蝴蝶),实现了可控的温敏变形驱动(图2)。
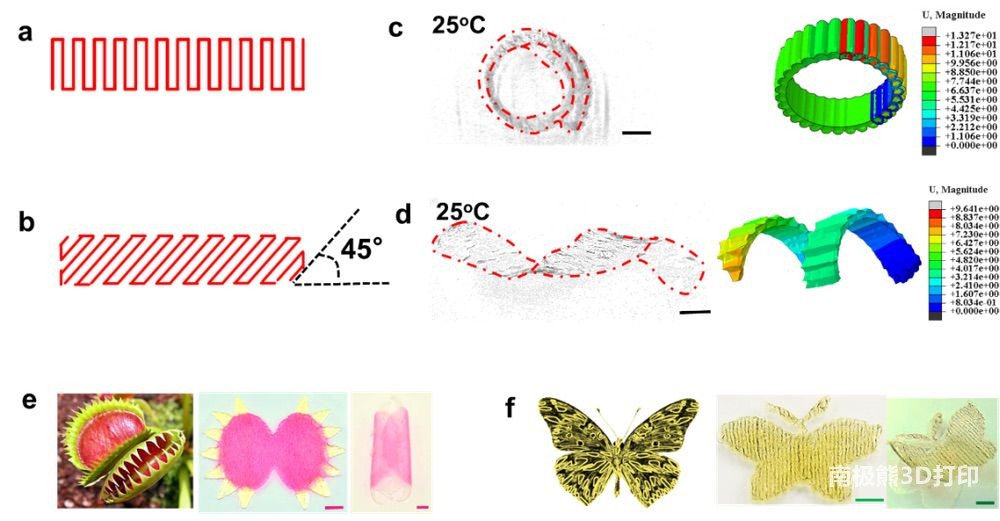
图2 (a, b)水凝胶的打印路径及(c, d)水凝胶在常温水溶液中的变形和有限元模拟。标尺:5 mm。(e)捕蝇草及仿捕蝇草4D打印的水凝胶。(f)蝴蝶及仿蝴蝶4D打印的水凝胶。标尺:5mm。
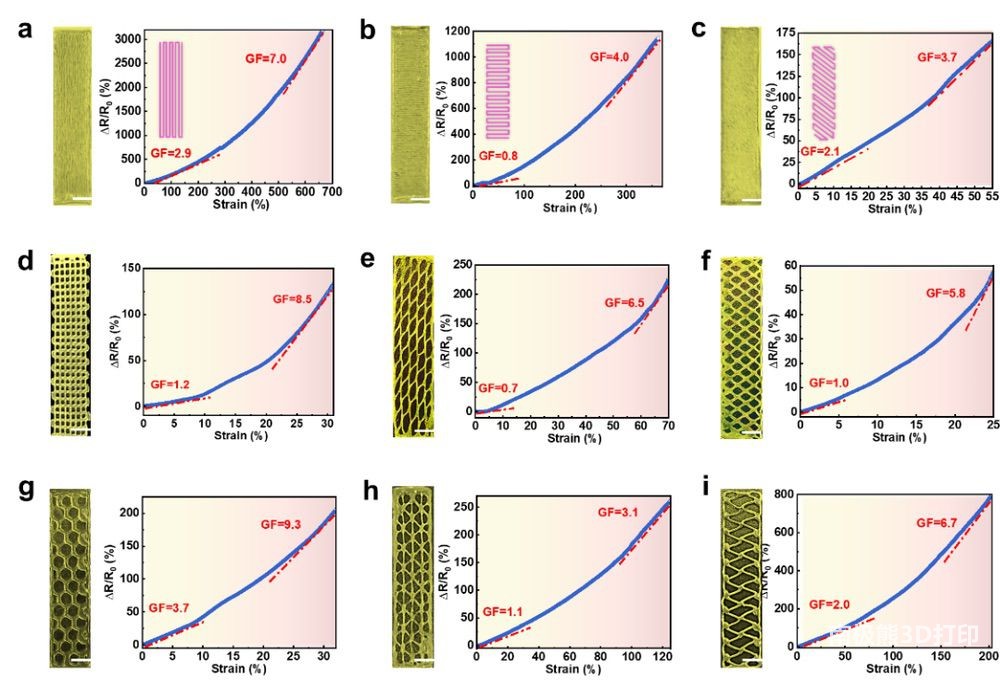
碳纤维的高电导率和取向结构赋予复合水凝胶较好的传感性能。作者系统地研究了打印路径、水凝胶图案、网格结构等不同几何特征对传感性能的影响,研究发现,当碳纤维排列方向与拉伸方向相同时,此时的灵敏度最高且检测范围最大(图3)。将这种传感器贴附在手腕,手肘等关节处,能够实时监测关节的运动(图4a, b);将其贴附于声带,能够检测喝水和说话导致的微弱的振动(图4c, d)。
图3 沿(a)平行、(b)垂直于拉伸方向和(c)与拉伸方向成45o角打印的水凝胶的灵敏度。(d-i)不同网格结构水凝胶的灵敏度。标尺:5mm。
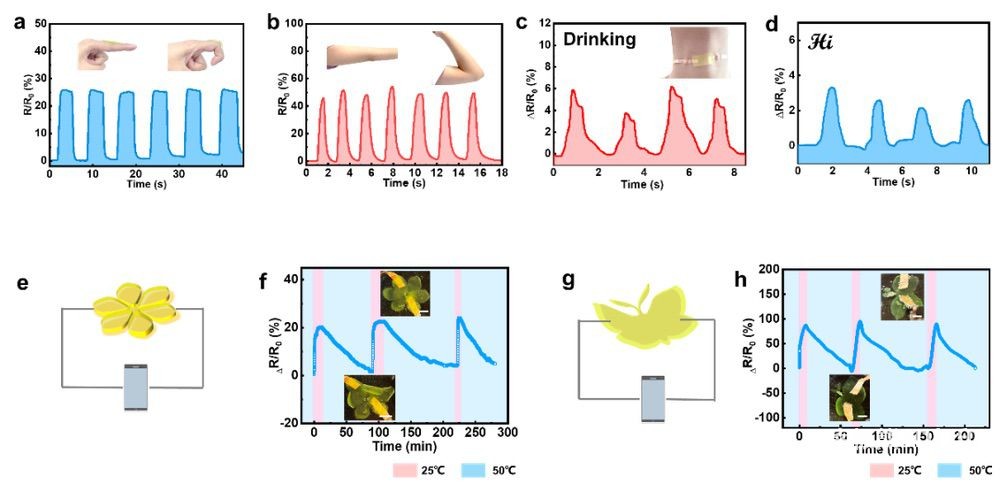
短碳纤维复合水凝胶的传感性能主要源于碳纤维在凝胶变形过程中的相对滑移。当温度改变时,水凝胶发生变形,其内部的碳纤维会随之发生相对移动,导致水凝胶电阻的变化。这就为驱动-传感一体化提供了可能。该团队打印了花瓣形和蝴蝶形的温敏复合水凝胶驱动器,调节温度,在水凝胶驱动过程中实时监测材料电阻率变化,当水凝胶驱动器在25℃和50℃之间反复驱动过程中,检测到稳定、可重复的电阻变化,二者呈现很强的相关性(图4f, h)。因此,该研究实现了对水凝胶驱动的自我监测。该方法可为智能软机器人的自我感知和反馈系统提供一定的启发。
图4
水凝胶传感器监测(a)手指、(b)肘部的运动信号,以及声带在(c)喝水、(d)说“嗨”时的信号。(e)花形驱动器的自感知原理图及(f)在25℃和50℃下可逆驱动的信号。(j)蝶形驱动器的自感知原理图及(h)在25℃和50℃下翅膀挥舞时的信号。标尺:5
mm。
该研究开发了一种方便、可编程的仿生各向异性水凝胶驱动器的制备方法,为软驱动器与传感器的集成开辟了一条道路,对于智能软机器人的开发和应用具有重要的意义。
该工作以“4D Printing of Biomimetic Anisotropic Self-sensing Hydrogel Actuators”为题发表在Chemical Engineering Journal。
论文链接:https://authors.elsevier.com/a/1hbs8_VWlWH2ml
(责任编辑:admin)

 NASA与ICON联手推进太空3D
NASA与ICON联手推进太空3D 第八届医院3D打印论坛:个
第八届医院3D打印论坛:个 3D打印巨头Stratasys收购
3D打印巨头Stratasys收购 Nature子刊:3D打印技术助
Nature子刊:3D打印技术助 全球两大3D扫描仪巨头合并
全球两大3D扫描仪巨头合并 美国交通部长称,FAA正借
美国交通部长称,FAA正借最新内容
 美国空军2860万美
美国空军2860万美 美国军工企业强强
美国军工企业强强 美国斥资450万美
美国斥资450万美 GoEngineer通过收
GoEngineer通过收 3D食品打印:烹
3D食品打印:烹 卡内基梅隆研究人
卡内基梅隆研究人热点内容


