WPI研究人员开发用于搜救行动的3D打印机器人
时间:2023-08-16 15:10 来源:南极熊 作者:admin 阅读:次
2023年8月16日,美国伍斯特理工学院(WPI)的研究员Markus
Nemitz获得了美国国家科学基金会颁发的59.9万美元(约为436万人民币)职业奖,旨在开发一种新型低成本、可定制的3D打印软机器人,这些机器人可应用于具有挑战性环境的搜救行动。另外,该项目有望应用于太空探索、气候监测和敌对环境中的检查操作等其它领域。

开发者的初心
软体机器人采用高度可塑性材料制造,能够实现类似于传统机器人难以模仿的生物体灵活运动,使其特别适用于搜索和救援任务。这些任务可能需要机器人在封闭空间中游泳、爬行、攀爬和潜水。

Nemitz的研究重点是开发集成流体回路的小型灵活3D打印机器人,能够快速生产和定制,以应对特定的灾难条件。这些机器人将在模拟泰国Tham Luang(睡美人)洞穴部分区域的微型模型中进行测试,该洞穴在2018年被洪水困住,12名青少年足球运动员和教练被困其中。
该研究项目于8月1日启动,预计将持续到2028年7月31日。
WPI机器人工程系助理教授Nemitz评论道:“灾难往往需要独特、专业的应对措施,就像睡美人洞穴危机所需的那样。开发由柔软、灵活的材料快速制造的小型机器人具有巨大的潜力,它们能够探索人类难以进入的潜在危险区域,包括地震遗址、洪水泛滥区甚至核事故现场,从而极大地助力救援工作。”
开发3D打印搜救机器人
在这个项目中,Nemitz致力于开发机器人设计和制造的创新原则,将机械智能、3D打印流体电路和柔性电子器件相融合。
机械智能利用机器人的几何形状和材料特性来适应意外条件,从而显著降低机器人所需的计算能力。
流体电路则通过在机器人内部的灵活通道中引导流体运动,将外部刺激信号转化为控制机器人功能的命令。这些电路可以直接嵌入到机器人的身体内,在弯曲或扭曲时仍能保持功能。Nemetz的目标是开发具有集成流体状态机的3D打印机器人,该状态机能够响应流体传感器并控制流体执行器。因此,该项目将致力于开发一种新型的互补流体门和电流体存储元件。
此外,项目还将采用高度动态变形耐受性的柔性、可拉伸电子器件。柔性电子电路和电流体互连将使用导电墨水和弹性体集成到机器人中。机器人内的电子设备将仅用于选择流体功能、激活流体传感器功能以及将程序写入流体存储器。
商业3D打印机和弹性纤维将用于制造这些机器人。为确保可行性,Nemitz将评估设计和3D打印机器人所需的时间。此外,还将评估机器人在实验室模型洞穴系统内达到指定目标的能力。
Nemitz解释道:“这些机器人配备了麦克风和摄像头等传感器,将增强救援人员的能力,特别是在自然灾害时。为了确保能够在紧急情况下做出快速、动态的响应,我们必须不断创新和开发新技术。机器人技术正处于这一发展的前沿。”
作为项目的一部分,Nemitz还将为伍斯特县的女高中生举办机器人实践夏令营。这与WPI推出新的3D打印机器人本科课程的计划相一致。
△Markus Nemitz展示软体机器人原型
开发者的初心
软体机器人采用高度可塑性材料制造,能够实现类似于传统机器人难以模仿的生物体灵活运动,使其特别适用于搜索和救援任务。这些任务可能需要机器人在封闭空间中游泳、爬行、攀爬和潜水。
△针对该救援事件后期拍摄的纪录片海报
Nemitz的研究重点是开发集成流体回路的小型灵活3D打印机器人,能够快速生产和定制,以应对特定的灾难条件。这些机器人将在模拟泰国Tham Luang(睡美人)洞穴部分区域的微型模型中进行测试,该洞穴在2018年被洪水困住,12名青少年足球运动员和教练被困其中。
该研究项目于8月1日启动,预计将持续到2028年7月31日。
WPI机器人工程系助理教授Nemitz评论道:“灾难往往需要独特、专业的应对措施,就像睡美人洞穴危机所需的那样。开发由柔软、灵活的材料快速制造的小型机器人具有巨大的潜力,它们能够探索人类难以进入的潜在危险区域,包括地震遗址、洪水泛滥区甚至核事故现场,从而极大地助力救援工作。”
△该名获奖研究员Markus Nemitz
开发3D打印搜救机器人
在这个项目中,Nemitz致力于开发机器人设计和制造的创新原则,将机械智能、3D打印流体电路和柔性电子器件相融合。
机械智能利用机器人的几何形状和材料特性来适应意外条件,从而显著降低机器人所需的计算能力。
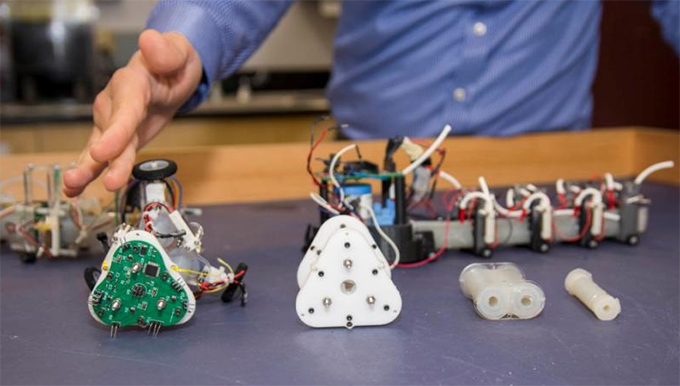
△早在2017年,WPI研究人员开发的一款蛇形软体机器人,从右向左看,一个柔软、可压缩的致动器;两个致动器放在一起,使得蛇形机器人能够侧向移动;一个带有三个致动器的模块,使机器人还能够抬起头部;一个带有电子设备的完整模块
流体电路则通过在机器人内部的灵活通道中引导流体运动,将外部刺激信号转化为控制机器人功能的命令。这些电路可以直接嵌入到机器人的身体内,在弯曲或扭曲时仍能保持功能。Nemetz的目标是开发具有集成流体状态机的3D打印机器人,该状态机能够响应流体传感器并控制流体执行器。因此,该项目将致力于开发一种新型的互补流体门和电流体存储元件。
此外,项目还将采用高度动态变形耐受性的柔性、可拉伸电子器件。柔性电子电路和电流体互连将使用导电墨水和弹性体集成到机器人中。机器人内的电子设备将仅用于选择流体功能、激活流体传感器功能以及将程序写入流体存储器。
商业3D打印机和弹性纤维将用于制造这些机器人。为确保可行性,Nemitz将评估设计和3D打印机器人所需的时间。此外,还将评估机器人在实验室模型洞穴系统内达到指定目标的能力。
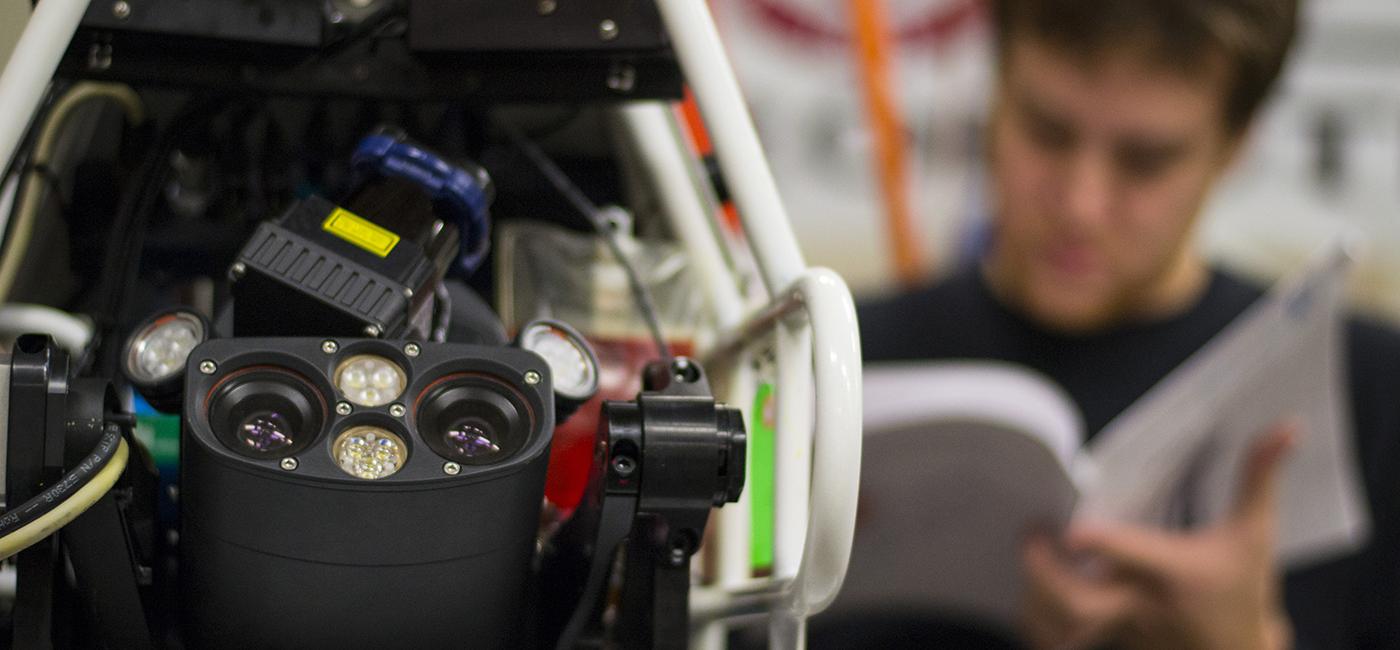
△WPI拥有机器人工程学士学位和相关研究生课程,处于机器人教育和研究的前沿
Nemitz解释道:“这些机器人配备了麦克风和摄像头等传感器,将增强救援人员的能力,特别是在自然灾害时。为了确保能够在紧急情况下做出快速、动态的响应,我们必须不断创新和开发新技术。机器人技术正处于这一发展的前沿。”
作为项目的一部分,Nemitz还将为伍斯特县的女高中生举办机器人实践夏令营。这与WPI推出新的3D打印机器人本科课程的计划相一致。
(责任编辑:admin)

相关内容
 梁柏涛:美国参议院这一票
梁柏涛:美国参议院这一票 美国俄亥俄州宣布拨款6200
美国俄亥俄州宣布拨款6200 Schunk集团全资收购ESK-SI
Schunk集团全资收购ESK-SI 美国空军利用拓竹3D打印机
美国空军利用拓竹3D打印机 3D Systems推出集成式数字
3D Systems推出集成式数字 Aker Solutions设立新3D打
Aker Solutions设立新3D打最新内容
 GoEngineer通过收
GoEngineer通过收 3D食品打印:烹
3D食品打印:烹 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角热点内容


