我国科学家受折纸启发开发3D打印软机器人
时间:2020-09-17 11:55 来源:中国3D打印网 作者:中国3D打印网 阅读:次
研究人员解释说:“除力学方法外,折纸艺术由于其可折叠性,可展开性,灵活性,无标度的几何形状以及可编程的重新配置,现在也被接受为机械超材料设计的直观而富饶的灵感。”先前的研究已经产生了微型机器人,软机器人,用于医疗任务的可摄取机器人,兼容模块,医疗设备,抓手等。
该团队从可折叠的折纸弹簧开始,然后发展到超材料角色-探索从折叠的几何形状获得的属性。最终,由于3D打印材料根据需要折叠,他们的原型能够爬行行为。

将折纸模型转换为完全可编程的机器人系统的流程图。
可折叠弹簧的灵感来自一个折叠并扭曲成均匀直角三角形的纸矩形。

纸弹簧的几何形状从折痕变为螺旋形。
研究人员解释说:“从俯视图看,当纸弹簧展开时,弹簧的宽度呈螺旋形收缩,风扇之间的重叠区域增大,直到完全重叠为止。”

可折叠纸弹簧的内在特质机制:(a)状态#1-#2:高度可逆的可压缩性,(b)状态#2-#3:在横向压缩和纵向拉伸性之间具有良好的可切换性,以及(c)状态#4:曲线部署。

折纸启发的弹簧超材料的数字制作流程图。
使用他们自己的定制3D打印机,PLA和0.3mm FDM喷嘴,他们能够“数字化折纸风格的弹簧超材料。”他们能够创造出一种柔软的抓手,事实证明该抓手是“完全3D可打印的”,并且有助于拾取形状更不规则的物体。

折纸启发的弹簧超材料及其弹性。
总体而言,该团队能够采用3D打印作为具有所需机械性能的可编程控制方法,从而克服了有关可打印性,可折叠性以及更好的耐损伤性的任何障碍。成功制造了两种类型的软机器人,包括它们的“爬行机器人”。
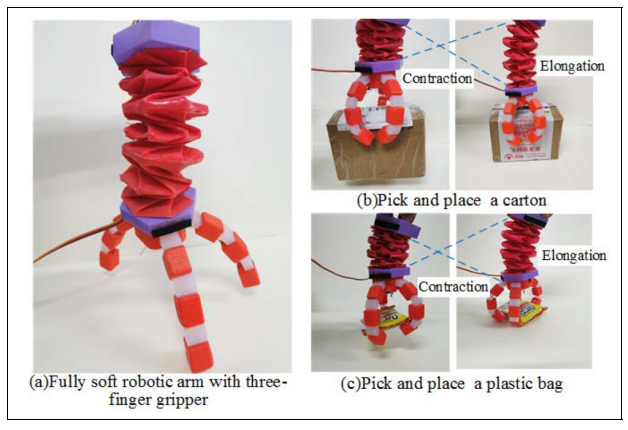
具有高度可逆的可压缩臂的全软机械手:(a)具有三指抓具的全软机械手。 (b)拾取并放置纸箱。 (c)拾起并放置一个塑料袋

一种蠕动爬行机器人,具有由曲线展开引起的波动运动。 (a)完全压缩状态; (b)伸长状态; (c)完全曲线展开; (d)开始压缩; (e)压缩状态;和(e)完全压缩状态
随着3D打印,4D打印和超材料的使用通过全球研究而继续扩大,通过诸如数字制造等更先进的技术,软机器人技术也变得越来越有可能,从而带来了包括仿生软机器人,集成致动器和机器人在内的各种创新。甚至游泳柔软的机器人。
(责任编辑:admin)

 开创性增设小型家用电器制
开创性增设小型家用电器制 央视财经:义乌又出“爆款
央视财经:义乌又出“爆款 砂型3D打印厂商三帝科技并
砂型3D打印厂商三帝科技并 山东省材料学会增材制造分
山东省材料学会增材制造分 Formlabs携手神州数码,赋
Formlabs携手神州数码,赋 一天打印一艘实用船艇 全
一天打印一艘实用船艇 全最新内容
 忍痛5年,福州依
忍痛5年,福州依 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致热点内容


