麻省理工用机器人臂3D打印无需支撑的自由形建筑
时间:2017-07-14 09:28 来源:天工社 作者:中国3D打印网 阅读:次
最近,麻省理工(MIT)建筑与规划学院的两名研究人员提出了一个新的建筑3D打印概念――应力线增材制造(SLAM),其目的是实时建造自由形式的建筑物。这项研究已经发表在《3D Printing and Additive Manufacturing》杂志上。
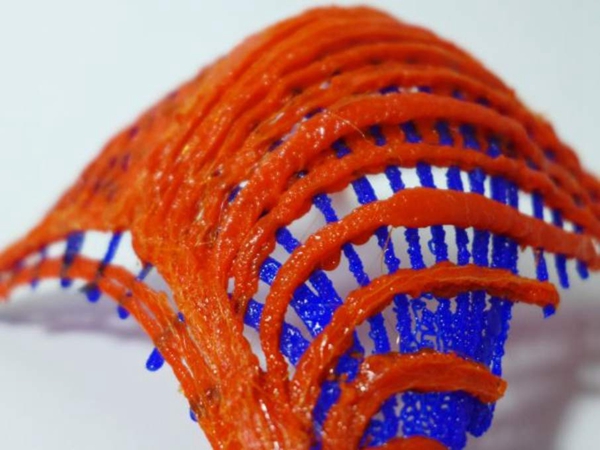
鉴于逐层沉积材料这种操作会引起结构性应力,SLAM挑战了典型的FDM建造方法,它制造的是看起来像圆屋顶的格栅结构。这些结构的强度来自网格状排列的曲线。在建筑业,自19世纪初开始,格栅一被用来制造外墙和天花板。
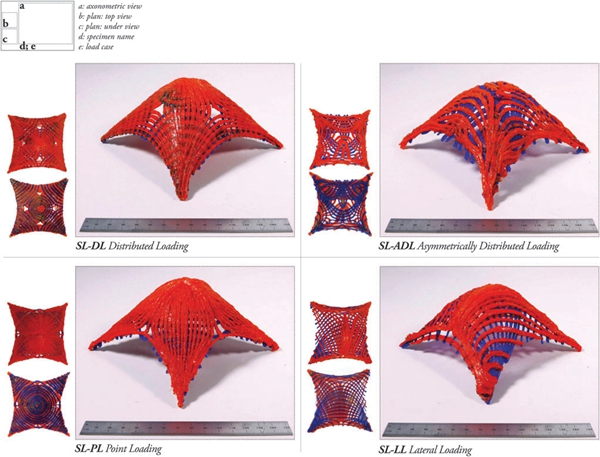
为了更好地了解3D打印材料对应力的响应方式,研究人员设计了四种不同的格栅形状,以确定曲线的间距和方向是如何影响重量支撑的。为此,他们用一个KUKA机器人臂在一个弯曲的木制表面上3D打印出每种形状。机械测试证明,格栅形状是一种可行的结构,能独立支撑重量。
接下来,研究人员将进一步把这个建筑理论应用到设计上,并制造出固体填充的对象。他们还希望能将传感器集成到系统中,以让机器人臂在打印时能智能地适应设计。
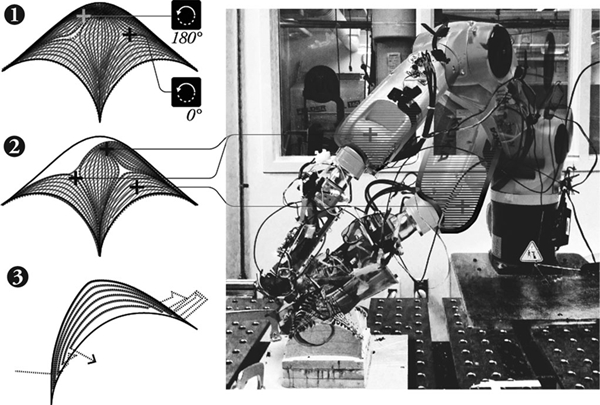
最终,研究人员希望消除用机器人臂进行3D打印时的支持需求,用SLAM制造出形式自由和灵活的结构。
(编译自3ders.org)
(责任编辑:admin)

 大西洋大学开发用于食道癌
大西洋大学开发用于食道癌 Ashley Furniture在制造过
Ashley Furniture在制造过 看美国研究人员如何继续改
看美国研究人员如何继续改 ITAMCO和普渡大学合作为美
ITAMCO和普渡大学合作为美 汉高收购美国一3D打印公司
汉高收购美国一3D打印公司 加拿大卫生部发布医疗设备
加拿大卫生部发布医疗设备最新内容
热点内容


