美国陆军3D打印鱿鱼般的软体机器人,以提高战斗中的隐身能力
时间:2018-04-18 21:49 来源:中国3D打印网 作者:中国3D打印网 阅读:次

(来源:Shutterstock)
据研究非线性结构动力学的陆军研究员Ed Habtour博士说:“成功的隐身机动需要高度的结构灵活性和分布控制,以便潜入狭窄的空间,长时间运行并模拟生物学形态和适应性。
Ed Habtour博士在美国陆军研究实验室的车辆技术局工作
目前用于军事行动的机器人主要由刚性机械和电气零部件组成,限制了其灵活性。他们实现更复杂的运动类型也依赖于复杂的电路机制。未来军事机器人研究的一个关键目标是从更基本的机制中获得相同类型的运动,并降低其复杂性并改进其构建方式。该小组研究了无脊椎动物如蠕虫,章鱼和昆虫等,研究它们如何在没有骨架或其他刚性部分的情况下实现有效运动。在深入了解这些软分布式驱动电路背后的机制之后,他们利用他们的见解将3D打印原型组装在一起。
他们利用一种通用的模型,利用3D打印技术以及与无脊椎动物具有相似机械特性的柔软可拉伸材料。该原型是第一款可以执行高弯曲运动的完全3D打印介电弹性体致动器(DEA)。然后对这个3D打印的原型进行进一步的测试以获得更多有用的数据。

(现在的军用机器人,Credit:Boston Dynamics)
以无脊椎动物为原型的软机器人不仅在军事行动方面具有优势,而且在战术要求较高的情况下,士兵也可以轻松组装起来。软DEA的基本材料属性会给机器人提供必要的可操作性。这意味着他们可以很容易地通过有限的先前技术知识的士兵在战场上进行3D打印。此外,与目前3D打印的DEA不同,后处理步骤(如干燥和组装)不是必需的,可节省大量时间。

(来源:美国陆军研究实验室)
正在进行的研究将进一步了解无脊椎动物灵活的运动和韧性背后的原理,这可能会有更多有用的应用。 Habtour说:“材料的微观力学性能和各种非线性之间的有趣互动可能为模拟生物系统中的共生相互作用提供新的科学机会。如果我们能够理解这些相互作用,那么我们就可以利用这些见解来制造动态结构和灵活的机器人,这些机器人被设计成具有自我意识,自我感知能力,并且能够实时调整其形态和特性以适应无数的外部和内部条件。“
这项研究结果发表在“极端力学通讯”(EML)期刊上,题为“3-D打印电动软驱动器”。
中国3D打印网译自:3ders.org 转载需注明出处!
(责任编辑:admin)

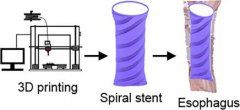 大西洋大学开发用于食道癌
大西洋大学开发用于食道癌 Ashley Furniture在制造过
Ashley Furniture在制造过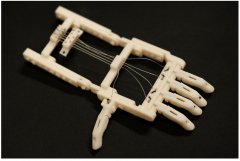 看美国研究人员如何继续改
看美国研究人员如何继续改 ITAMCO和普渡大学合作为美
ITAMCO和普渡大学合作为美 汉高收购美国一3D打印公司
汉高收购美国一3D打印公司 加拿大卫生部发布医疗设备
加拿大卫生部发布医疗设备最新内容
热点内容


