科学家3D打印技术改进攀岩机器人RoboSimian
时间:2016-11-01 11:26 来源:3ders.org_3D虎 作者:中国3D打印网 阅读:次

曾经,斯坦福大学也曾做过一个仿生学的开发系统,从壁虎身上汲取灵感,然后设计出很小的吸盘和刺来帮助爬壁机器人获取所需的表面牵引力。因此,虽然此次的设计并不是全新概念,但是研究人员却花了超过十年的时间来完成,可见其诚意。而现在,RoboSimian相比以前的爬壁机器人来说,速度加快了四倍,并且可以在完全垂直的岩石面上进行攀爬。
根据美国电器和电子工程师学会的报告指出,RoboSimian在工作时会使用复杂的阵列来紧紧抓住岩石表面。因此,RoboSimian在控件数量上是完全超过传统仿生机器人的。“它们的表面比较粗糙,但脊柱是很小的一部分,因此它还可以承载更多的重量。”报告中显示到。

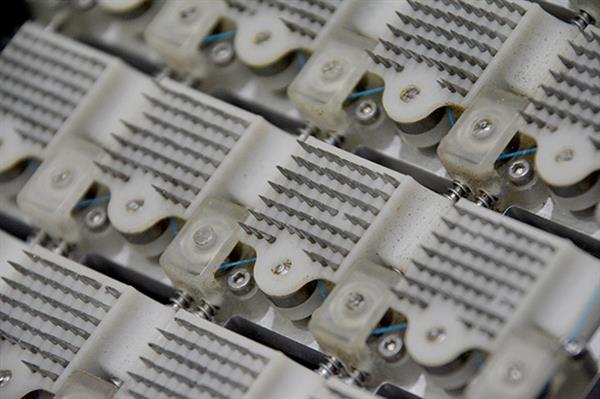
据中国3D打印网了解,在RoboSimian的生产中,3D打印技术被用来生产套管和长15毫米的钢刺。斯坦福研究人员认为3D打印的外壳一方面能够减轻重量,同时使用尼龙和聚碳酸酯等材料可以提升抗冲击力和耐力。
而在此前我们所提到的能够提升四倍速度,则是通过使用单一的柔性轴达到的。每一块隔片都有60根钢刺,每十二块隔片组成一个组件,因此就有了更大的握力和承受力。同时,所有的钢刺都有一个延伸方向,因此抓地力会很与重力互相作用形成一个行进方向。
目前,斯坦福研究人员还在进行进一步的物理实验,因为RoboSimian要想在光滑的表面上移动还是很困难。展望未来,如果RoboSimian能够得到进一步的研究,那么这项技术将很有可能被美国宇航局喷气推进实验室应用。
(责任编辑:admin)

 创想三维精彩亮相美国RAPI
创想三维精彩亮相美国RAPI 2019年中国技能竞赛“创想
2019年中国技能竞赛“创想 如何撬动消费升级带来的千
如何撬动消费升级带来的千 数字经济×千亿产业,催生
数字经济×千亿产业,催生 中南大学“创想杯”3D打印
中南大学“创想杯”3D打印 创想三维走进浙江科技学院
创想三维走进浙江科技学院最新内容
 国际博物馆日,中
国际博物馆日,中 全球首例3D打印人
全球首例3D打印人 未来就是现在,工
未来就是现在,工热点内容


