爱尔兰:研究人员创建了用于神经生理学的开源3D打印机
时间:2020-03-26 09:47 来源:中国3D打印网 作者:中国3D打印网 阅读:次
中国3D打印网3月26日讯,研究员Thomas
Campbell和James
F.X.爱尔兰都柏林大学医学院的Jones都为医学领域创建了一种新的3D打印机,并在最近出版的“低成本,模块化,适应性强且开源的设计和实现”中详细介绍了他们的工作。
XYZ神经生理学定位系统。”
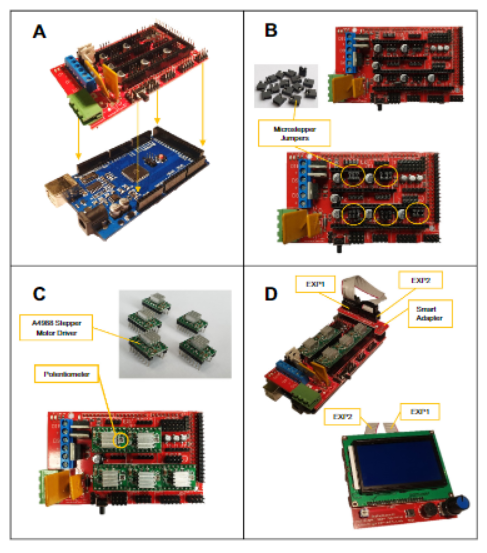
作者已经创建了一个开源系统,该系统可以依靠能够移动传感器或探头的XYZ定位系统针对各种项目进行定制。就像龙门起重机一样,这种新型FDM打印机由标准的Raspberry Pi 3,Arduino Mega,RAMPS 1.4电机护罩和NEMA17双极步进电机运行。框架由20×20毫米铝挤压件组成,该挤压件由3D打印部件制成,并通过托架螺栓连接在一起。此类3D打印机的“输入成本”约为670.20美元。
通过集成Raspberry Pi 3,作者还能够合并开放计算机视觉库(OpenCV),该功能说明该系统与其他XYZ定位系统相比具有独特性。开源机器学习软件库与自动运动配合使用,并且创建者希望它可以改变对机械传导的探索,这是一种感觉神经元将机械刺激转换为电信号的方法。
3D打印机的运动由Arduino Mega控制,而Arduino Mega又由Raspberry Pi 3控制:“以这种主从配置来配置微控制器,可以通过Python3编程语言实现复杂运动范例的自动化。系统的电源取决于预期的使用情况。对于神经生理学,必须使用线性稳压的12 V DC电源来确保低EMI,但对于其他应用而言,12 V DC开关电源就足够了。
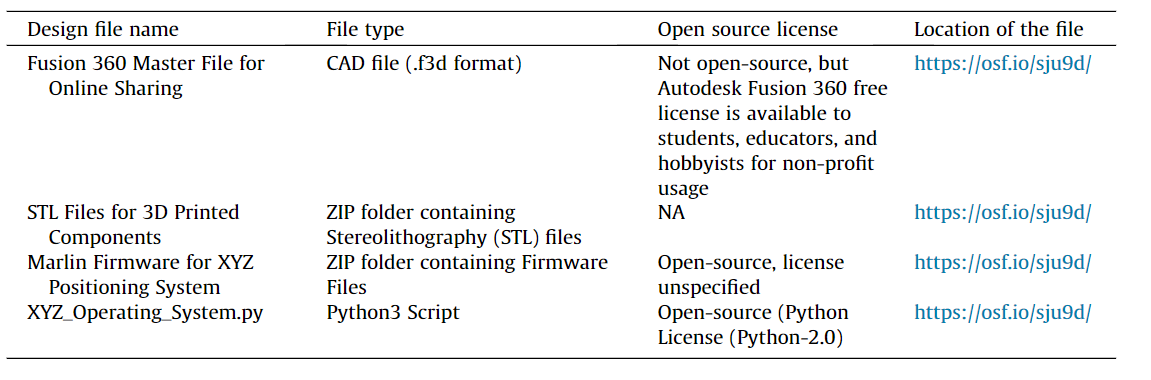
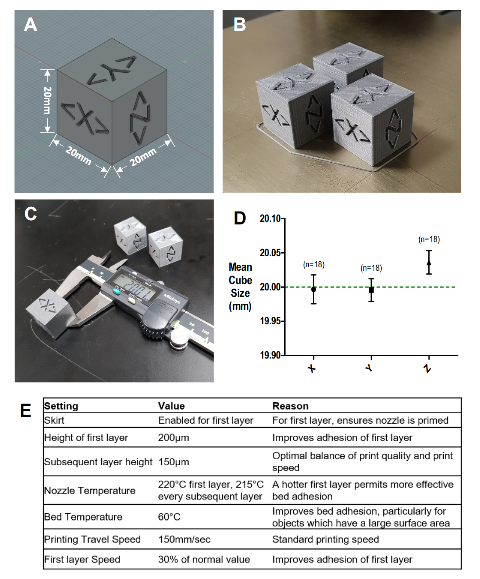
坎贝尔(Campbell)和琼斯(Jones)选择普拉(PLA)作为打印部件的材料,使用Prusa i3 MK3在Autodesk Fusion360中对校准立方体进行建模,并声明每个立方体的尺寸用数字卡尺测量了六次。不需要任何制造零件的支撑,所有这些零件的设计都具有最小的悬垂。
生成说明包括:
.Y轴滑架总成
.X和Z轴组件
.轴对齐
.电子和接线
.马林固件的准备和上传
.Raspberry Pi 3和OpenCV的设置
.创建基于终端的操作系统
为了在功能性神经生理学应用中使用,作者测试了该机器,以查看它是否能够促进肌肉纺锤体内的机械传导。激活阈值已成功显示:
.伸展距离
.拉伸速度
作者已经创建了一个开源系统,该系统可以依靠能够移动传感器或探头的XYZ定位系统针对各种项目进行定制。就像龙门起重机一样,这种新型FDM打印机由标准的Raspberry Pi 3,Arduino Mega,RAMPS 1.4电机护罩和NEMA17双极步进电机运行。框架由20×20毫米铝挤压件组成,该挤压件由3D打印部件制成,并通过托架螺栓连接在一起。此类3D打印机的“输入成本”约为670.20美元。
通过集成Raspberry Pi 3,作者还能够合并开放计算机视觉库(OpenCV),该功能说明该系统与其他XYZ定位系统相比具有独特性。开源机器学习软件库与自动运动配合使用,并且创建者希望它可以改变对机械传导的探索,这是一种感觉神经元将机械刺激转换为电信号的方法。
3D打印机的运动由Arduino Mega控制,而Arduino Mega又由Raspberry Pi 3控制:“以这种主从配置来配置微控制器,可以通过Python3编程语言实现复杂运动范例的自动化。系统的电源取决于预期的使用情况。对于神经生理学,必须使用线性稳压的12 V DC电源来确保低EMI,但对于其他应用而言,12 V DC开关电源就足够了。
坎贝尔(Campbell)和琼斯(Jones)选择普拉(PLA)作为打印部件的材料,使用Prusa i3 MK3在Autodesk Fusion360中对校准立方体进行建模,并声明每个立方体的尺寸用数字卡尺测量了六次。不需要任何制造零件的支撑,所有这些零件的设计都具有最小的悬垂。
生成说明包括:
.Y轴滑架总成
.X和Z轴组件
.轴对齐
.电子和接线
.马林固件的准备和上传
.Raspberry Pi 3和OpenCV的设置
.创建基于终端的操作系统
为了在功能性神经生理学应用中使用,作者测试了该机器,以查看它是否能够促进肌肉纺锤体内的机械传导。激活阈值已成功显示:
.伸展距离
.拉伸速度
.拉伸加速
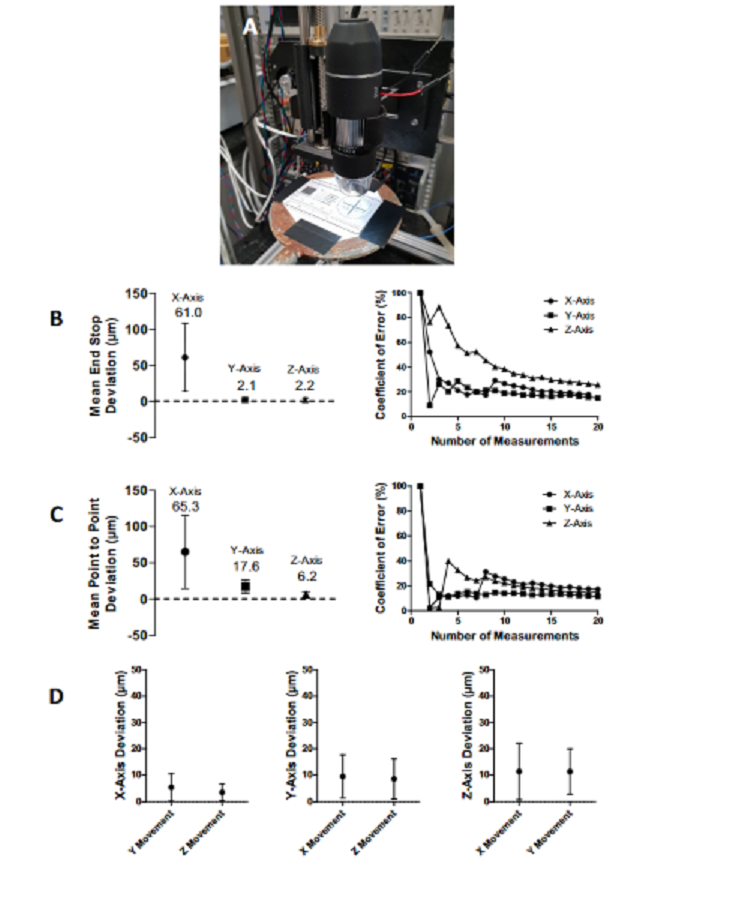
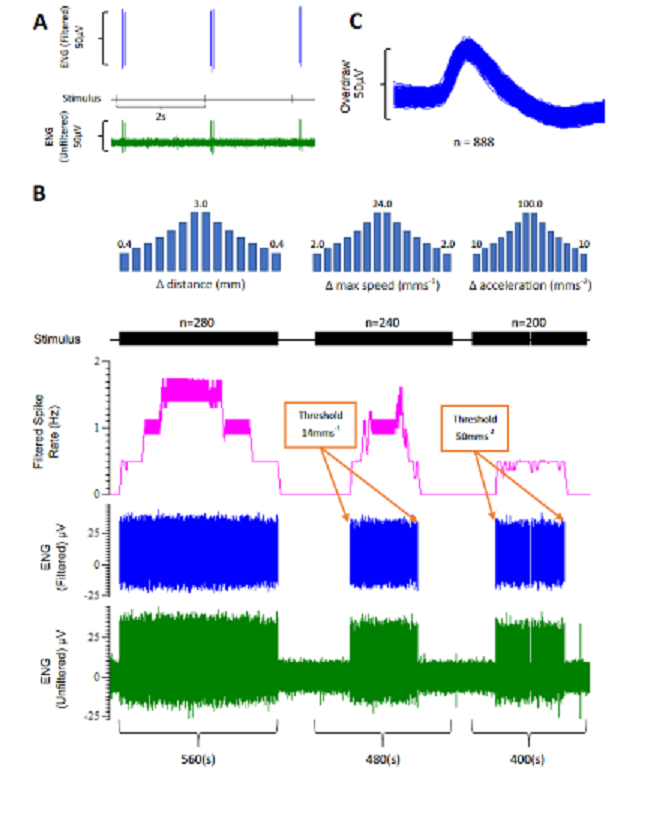
拉伸肌梭以研究机械转导。
(A)来自拉伸的肌肉纺锤体的传入神经活动。每两秒钟将短暂的拉伸脉搏施加到管腔,以引起来自肌肉纺锤体的机械传导。每个刺激脉冲指示拉伸的开始。过滤后的神经活动以蓝色表示,未过滤为绿色。
(B)机械拉伸激活阈值以拉伸距离,速度或加速度的逐渐增加来评估。对于该过滤单元,观察到的激活阈值为14.0 mms x 1和50 mms
x2。拉伸距离,速度或加速度的增加与神经活动的增加有关(Filtered Spike Rate)。
(C)在(B)中观察到的滤过神经活动的透支表明这是单单位记录。所有数据都记录在Spike2(剑桥电子设计)中。 ENG,神经电图。
(有关此图例中颜色参考的解释,读者可参考本文的网络版本。)18T。坎贝尔(J.F.X.)琼斯/ HardwareX 7(2020)e00098。
中国3D打印网点评:XYZ定位系统的主要局限性是机械性的。在我们的实现中,X和Z轴组件又高又重,因此我们选择将Y和Z轴的行进速度分别降低到2
mms x 1和5 mms x
1。速度的这种降低通过降低步进电机错误步进的可能性来保持系统的位置完整性。但是,可以将组件调整为所需的特定用例,并且简单地减小Z轴的大小将大大减小其惯性,并在更高的行进速度下实现定位精度。所使用的所有组件和软件都是开源的,可以免费访问或以低成本获得。鉴于可以轻松访问这些组件以及该系统提供的潜力,相信其他研究小组可能会发现该系统是一种有吸引力且有用的实验工具。”
来源: 中国3D打印网
(责任编辑:admin)

 全新Ourobionics CHIMERA
全新Ourobionics CHIMERA Ourobionics BV推出一款五
Ourobionics BV推出一款五 EFL 发布全新投影式光固化
EFL 发布全新投影式光固化 斯坦福大学开发出低成本开
斯坦福大学开发出低成本开 ChangeMaker 3D为英国火车
ChangeMaker 3D为英国火车 基于神经网络切片的高精度
基于神经网络切片的高精度最新内容
 FLUICELL 推出第
FLUICELL 推出第 可用于皮肤烧伤修
可用于皮肤烧伤修 mimiX Biotherape
mimiX Biotherape 皮肤生物3D打印机
皮肤生物3D打印机 研究人员开发了用
研究人员开发了用 研究人员开发了用
研究人员开发了用热点内容


