折纸启发的水陆两栖软体爬行3D打印机器人,北方工业大学胡福文课题组
时间:2024-08-22 09:32 来源:南极熊 作者:admin 阅读:次
水的密度约是空气的800倍,其粘性是空气的55倍,这种物理特性差异给水陆两栖机器人设计带来巨大挑战。特别是深水或深海行走机器人还要面对较大的静水压力。近日,北方工业大学胡福文课题组通过揭示折纸弹性球模型所蕴含的超材料变形机制,成功研制了一类新型可3D打印的体素型软体四足水陆两栖爬行机器人。
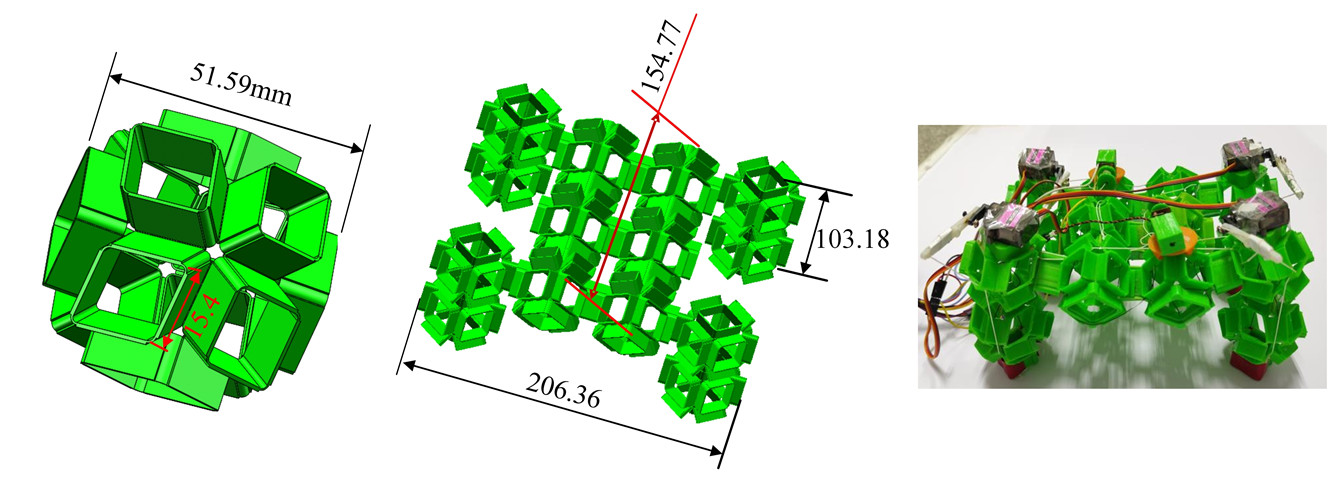
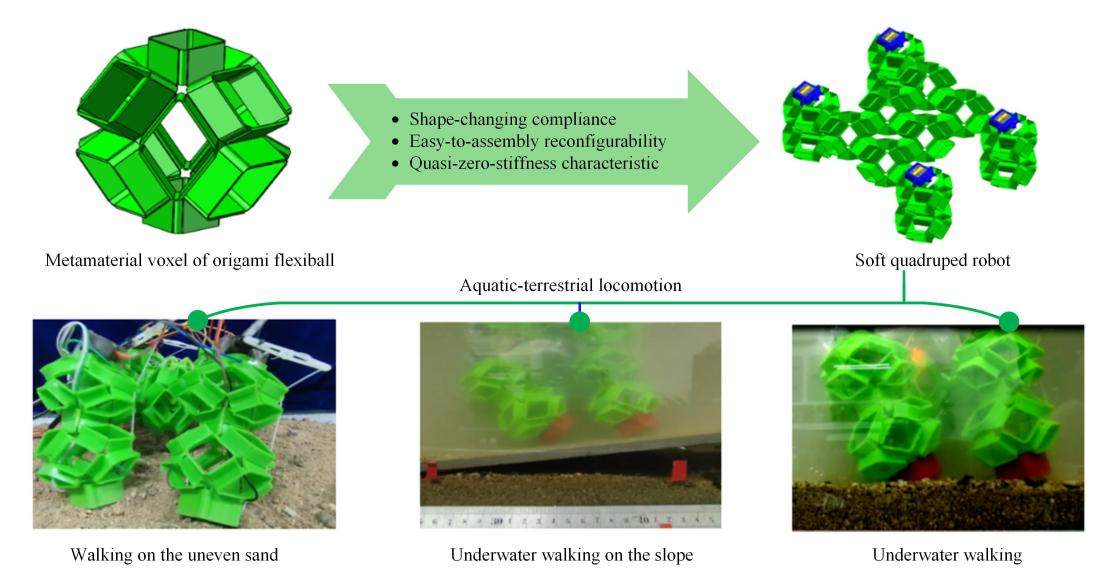
这款机器人的灵感来源是一种折纸弹性球模型。他们的研究揭示了此折纸模型蕴含的多自由度柔顺性、易于组装的可重构性、准零刚度变形等迷人特性。机器人本体由14个3D打印的折纸弹性球模型组装而成,从结构上来说具有“极简性”,具有制造成本低、可模块化扩展等优点。
机器人通过电机绳驱腿部弯曲实现了四足行走和蠕动爬行步态。水下环境实验表明,机器人可以较好适应水介质中的沙地、斜坡等地面环境以及人工浪涌。和陆上的行走实验相比,运动的速度没有出现明显的降低。此外,水深的增加反而在一定范围内促进了机器人的行走。显然,这种“全镂空”的折纸结构给机器人抵抗静水压力和减少运动阻力提供了优势。
这项研究进展不仅拓宽了创新设计水陆两栖机器人的视野,还为更宏大的研究愿景――可直接从3D打印机中走出的机器人(Robots walking from 3D Printers)开辟了新的契机。这项原创性成果以题为“A Soft Amphibious Voxel-Type Quadruped Robot Based on Origami Flexiball of Rhombic Dodecahedron”的论文发表在JCR一区、国际学术期刊《Biomimetics》上,论文链接https://doi.org/10.3390/biomimetics9080482。
北方工业大学胡福文课题组主要从事智能工业系统、新形态机器人、增材制造等领域的理论研究和技术研发工作,在《Journal of Intelligent Manufacturing》、《Advanced Engineering Informatics》、《Computers in Industry》、《Soft Robotics》等国际知名期刊上发表论文40余篇,获省部级教学成果奖二等奖1项、省部级科技成果奖一等奖1项、二等奖2项,获全国大学生“挑战杯”竞赛一等奖1项。
(责任编辑:admin)

 649美元!Revopoint全新Me
649美元!Revopoint全新Me 649美元!Revopoint全新Re
649美元!Revopoint全新Re 苏黎世联邦理工学院推出采
苏黎世联邦理工学院推出采 贵州首例!贵州医附院骨科
贵州首例!贵州医附院骨科 浙江省人民医院/浙江大学
浙江省人民医院/浙江大学 ADNOC Gas使用3D打印按需
ADNOC Gas使用3D打印按需最新内容
 哥伦比亚大学采用
哥伦比亚大学采用 失去1/3掌面,浙大
失去1/3掌面,浙大 3D打印软皮垫增强
3D打印软皮垫增强 3D打印替换患病脊
3D打印替换患病脊 功能材料新“大门
功能材料新“大门 老牌运动品牌Jack
老牌运动品牌Jack热点内容


