斯坦福大学工程师3D打印鸟类机器人
时间:2021-12-28 08:31 来源:南极熊 作者:admin 阅读:次
20岁的 William Roderick博士说:"模仿鸟类的飞行和栖息方式并不容易,经过数百万年的进化,它们使起飞和降落看起来如此容易,即使在你在森林中发现的所有复杂和多变的树枝中也是如此。"在Cutkosky实验室对动物启发的机器人和在Lentink实验室对鸟类启发的空中机器人进行了多年的研究,使研究人员能够建立他们自己的栖息机器人,详细内容见12月1日发表在《Science Robotics》上的一篇论文。当连接到一架四旋翼无人机上时,形成了一个可以飞来飞去、抓取和携带物体并在各种表面栖息的机器人。研究人员用它来比较不同类型的鸟类脚趾排列,并测量俄勒冈州一个偏远森林中的微气候,显示了这项工作的潜在多功能性。
森林中的鸟类机器人
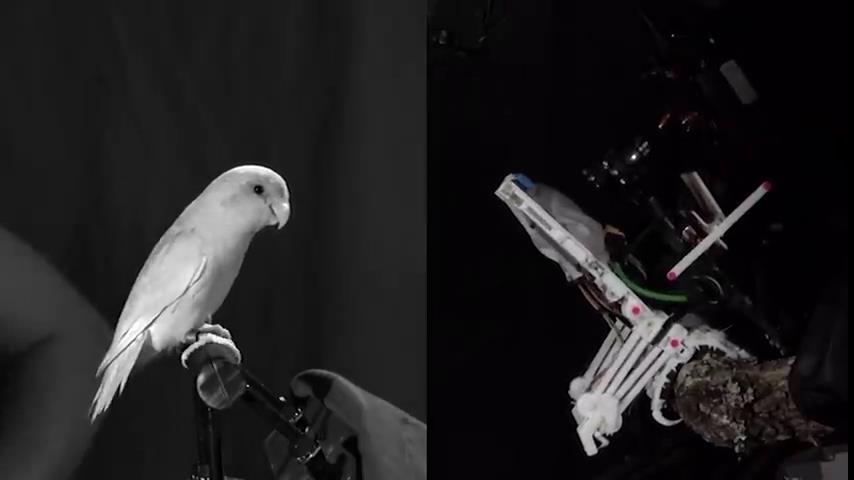
在研究人员之前对鹦鹉的研究中,身材矮小的鸟儿在特殊的栖息地之间来回飞翔,同时被五个高速摄像机记录下来。栖架--代表各种尺寸和材料,包括木头、泡沫、砂纸和特氟隆--还包含传感器,可以捕捉到与鸟类着陆、栖息和起飞有关的物理力。
就像鹦鹉一样,鸟类机器人以同样的方式对待每一次落地。但是,为了说明四旋翼飞机的尺寸,鸟类机器人是以游隼的腿为基础的。它有一个3D打印的结构,花了20次迭代才完善,代替骨头,电机和鱼线代替肌肉和肌腱。

每条腿都有自己的马达,用于前后移动,另一条腿用于处理抓取。受鸟类脚踝处肌腱走向的启发,机器人腿部的一个类似机制吸收着陆时的冲击能量,并被动地将其转化为抓取力。结果是,机器人有一个特别强大的高速离合器,可以在20毫秒内被触发关闭。一旦缠住树枝,鸟类机器人的脚踝就会被锁定,右脚上的加速器报告机器人已经着陆,并触发平衡算法来稳定它。
Roderick将包括一台3D打印机在内的设备从斯坦福大学的Lentink实验室搬到了俄勒冈州的农村,在那里他建立了一个地下室实验室进行控制测试。他让鸟类机器人沿着一个轨道系统,以预定的速度和方向向不同的表面发射机器人,以观察它在各种情况下的表现。最后,Roderick还冒险进入附近的森林,在真实世界中进行一些试运行。
这种机器人有无数可能的应用,包括搜索和救援以及野火监测;它还可以附加到无人机以外的技术上。鸟类机器人与鸟类的亲近也让我们对鸟类生物学有了独特的见解。例如,研究人员用两种不同的脚趾排列方式运行机器人,它有三个脚趾在前面,一个在后面,像游隼一样。两个脚趾在前面,两个在后面,像鹦鹉。他们惊讶地发现,两者之间的性能差异很小。研究人员还在机器人上安装了一个温度和湿度传感器,Roderick用它来记录俄勒冈州的气候。
Lentink赞扬了Roderick在一个长达数年的项目中的坚持不懈。
(责任编辑:admin)

 Xenia进军大幅面增材制造
Xenia进军大幅面增材制造 研究人员基于3D打印冰模板
研究人员基于3D打印冰模板 美国Brooks与惠普合作开发
美国Brooks与惠普合作开发 《AHM》:3D打印为患者定
《AHM》:3D打印为患者定 MB Therapeutics与Lynxter
MB Therapeutics与Lynxter 美国国防部正在使用3D打印
美国国防部正在使用3D打印最新内容
 美国空军引进3D砂
美国空军引进3D砂 3D打印个性化晶格
3D打印个性化晶格 伊犁州奎屯医院实
伊犁州奎屯医院实 昆士兰科技大学3D
昆士兰科技大学3D 全彩3D打印吉他在
全彩3D打印吉他在 PSAS成功发射3D打
PSAS成功发射3D打热点内容


